Zwar haben sich die massiven Beeinträchtigungen des Alltags merklich reduziert, die individuellen und gesellschaftlichen Belastungen in Folge der Corona-Pandemie sind aber noch immer spürbar. Das Post-Covid-Syndrom ist mittlerweile als Krankheitsbild anerkannt, und die Verbesserung von Diagnose, Prophylaxe und Therapie bilden eine Triebfeder medizinischer Forschung. Professor Thomas Urban entwickelte zusammen mit dem Post-Covid-Zentrum in Senftenberg ein spezifisches Therapie-Konzept für Post-Covid-19-Patient:Innen und stellte in einem Bericht zu seinem zurückliegenden Forschungssemester seine Ansätze, Vorgehensweise und einige Ergebnisse vor, wobei dies auch zentrale Themen seiner zweiten Habilitationsschrift sind.
Die angewandte Wissenschaft im medizinischen Bereich hatte sich bereits zu Anfang der Pandemie durch eine immens schnelle Entwicklung und Bereitstellung verschiedener wirksamer Impfstoffe und deren kontinuierliche Anpassung an unterschiedliche Varianten hervorgetan. Ohne diese Errungenschaften der pharmazeutischen Einrichtungen und Unternehmen in Forschung und Produktion wären die Folgewirkungen von Corona gewiss weit drastischer und langwieriger gewesen. Die Reaktion auf die Pandemie macht das innovative Potential anwendungsnaher, medizinischer Forschung sowie der Health Tech deutlich, die modernste Technologien mit einem Fokus auf das physische und psychische Wohl von Patient:Innen verbindet.
Forschung in Progress
Die Forschung in diesem Bereich ist aber keineswegs abgeschlossen: Einerseits gibt es immer neue Varianten des Virus und damit die Notwendigkeit, die Impfstoffe anzupassen, um vulnerable Gruppen weiter effektiv zu schützen. Andererseits muss sich die medizinische Entwicklung mit den physischen und psychischen Auswirkungen der Pandemie befassen. Wie bei der Entwicklung von Impfstoffen stellt dabei die Neuartigkeit des Erregers die Forschung vor Herausforderungen, muss es doch zunächst darum gehen, das Krankheitsbild selbst zu verstehen und seine verschiedenartigen Ausprägungen zu charakterisieren. An diese Grundlegung können dann Überlegungen zu therapeutischen Maßnahmen anschließen.
Dem Post-Covid-Syndrom kommt als nunmehr anerkanntem Krankheitsbild breite gesellschaftliche Aufmerksamkeit zu, gerade weil die Spätfolgen einer Corona-Erkrankung nicht wenige Menschen betreffen und in ihrem Alltag belasten. Auch wenn die beiden Phänomene umgangssprachlich synonym verwandt werden, bezeichnet Long-Covid die anhaltenden Beeinträchtigungen mehr als vier Wochen bis zu drei Monaten nach der Infektion, und Post-Covid den anschließenden Zeitraum.[1]
Vergleichbar mit anderen Infektionskrankheiten können aus einer Corona-Infektion (SARS-CoV-2) verschiedenartige Langzeitfolgen resultieren, die Beeinträchtigungen der Organsysteme wie Herz, Lunge, Gehirn und u.a. Nebenorgane über einen längeren Zeitraum umfassen. Langzeit meint hier anhaltenden Beschwerden zwölf Wochen nach der eigentlichen Infektion, wobei die Häufigkeit des Auftretens zwischen 10% und 20% schwankt. Als verursachende Faktoren werden aktuell eine Überaktivierung des Immunsystems und eine Thrombusbildung im Mikrogefäßsystem diskutiert.[2] Die Folgen für die Menschen sind wiederum breitgefächert und reichen von Erschöpfungszuständen (Fatigue[3]) über Herz-/Kreislaufprobleme und Gleichgewichtsstörungen bis hin zu Nervenleiden und anhaltendem Schmerz. Diese Varianz legt die Komplexität des Syndroms nahe, was einerseits seine medizinische Beschreibung sowie ursächliche Verortung und andererseits die therapeutischen Ansätze anbetrifft, wobei hier verschiedene Disziplinen der Medizin kooperieren müssen. Das Ziel der Therapie ist neben der Symptomlinderung die Vermeidung der Verstetigung der Leiden und Befähigung der Betroffenen zur Teilhabe am Privat- und Berufsleben.
Der Blended-Therapy-Ansatz
Für diese Multidisziplinarität eignet sich ein innovativer Therapieansatz, den Professor Urban im Rahmen seines Forschungssemester analysierte und den er zugleich an einem Corona-Therapie-Zentrum empirisch untersuchen konnte. Der gewählte Zugang nennt sich Blended-Therapy und verschränkt klassisch-analoge mit digitalen Therapieformen. Durch die digitale Ergänzung wird eine flexiblere, räumlich wie zeitlich ungebundenere Behandlung möglich, die auch kontinuierliche therapeutische Formen und eine individuelle Umsetzung ärztlicher Empfehlungen zulässt. Zum Beispiel erlauben mobile Apps und Smart-Watches eine automatisierte, engmaschige (Selbst-)Kontrolle sowie spezielle Monitor-Kamera-Systeme überwachte Übungen in der Häuslichkeit und deren Kontrolle in Echtzeit. Die Forschung an diesen Therapieansätzen ist auch deswegen geboten, weil es derzeit kaum spezifische sektorübergreifende Konzepte gibt und bislang auch kein Therapieansatz bei Post-Covid als Standard empfohlen wird, der sich den Ursachen der Leiden im Unterschied zu symptomlinderungsorientierten Ansätzen annimmt und der nach empirischen Kriterien überprüft worden wäre.
Orientiert an den S2k-Leitlinie der Deutschen Gesellschaft für Neurologie und dem Post-COVID-Versorgungskonzept der LMU wurde eine Therapie entwickelt, die die spezifischen Bedarfe von Post-Covid-Betroffenen einerseits berücksichtigt, aber andererseits den Patient:Innen in gewissem Maße Belastungen zumutet. Diese waren in den bisherigen Post-Corona-Therapien eher unüblich.[4] Eine Folge des beeinträchtigten Energiehaushalts sind mögliche spontane Zusammenbrüche (postexertionelle Malaise), die Patient:Innen nicht voraussehen konnten und die den Rekonvaleszenzprozess immens zurückwarfen.[5] Zugleich haben Therapiemethoden, die Formen der Belastung nutzen und Überanstrengungen durch kontrollierte Bedingungen vermeiden, durchaus Erfolge vorzuweisen. Das individuelle Energiemanagement und die Minimierung von Überlastung waren in den Therapieansätzen wichtige Faktoren.
Die Blended-Therapy verknüpft die klassische Behandlung in Präsenz mit digitalen Interventionsinstrumenten, womit sich die Möglichkeit zur Echtzeitanalyse der Belastung, des Leistungsvermögens und der Beanspruchung des energetischen Haushalts der Patient:Innen während der Übungen (auch in der Häuslichkeit) bietet. Anstatt einer umfassenden Schonung wurden sensomotorische Einschränkungen und Fatigue mit einem Gleichgewichtstraining und motorischen Übungstherapien begegnet. Anschließend wurde eine auf Fatigue ausgelegte kognitive Verhaltenstherapie umgesetzt, in deren Fokus zudem die sekundären psychosomatischen Symptome sowie die Erfassung der subjektiven Wirksamkeit der Trainingstherapie standen.
Studie und Auswertung
Die begleitende Studie fand in einem dreijährigen Zeitraum am dem Corona-Therapie-Zentrum Lausitz (Senftenberg) statt. Neben den Veränderungen der Leitsymptome mussten auch allgemeine Auswirkungen auf die physische und psychische Gesundheit sowie sekundäre Effekte beachtet werden. Der Studie standen 407 Patient:Innen zur Verfügung, die bestimmte Kriterien erfüllten. Die Trainings fanden in Präsenz ebenso statt wie bei den Patient:Innen zu Hause, wobei so die erforderliche Übungsdichte erreicht werden konnte. Die zweite Phase wurde von einer Befragungsstudie begleitet, um hieraus wichtige Erkenntnisse über den Nutzen therapeutischer Maßnahmen im Rahmen der Gesundheitsversorgung zu gewinnen.
Prof. Dr. Thomas Urban auf dem Ärzte-Konferenz an der Brandenburgischen Technischen Universität Cottbus – Senftenbergam am 12. März 2016
Die Evaluation der Therapie bemaß sich an zwei Kriterien, den Post-Covid-Leitsymptomen und den motorischen Fatigability-Parametern, wobei letztere einen Indikator für die Beweglichkeit bereitstellen. Generell ließen sich positive Effekte sowohl in Hinsicht der Leitsymptome als auch der motorischen und kognitiven Fatigability-Parameter ausmachen.[6] Am Ende konnten also ebenso positive therapeutische Effekte festgehalten werden sowie der Nutzen des Blended-Therapy-Ansatzes, der sich zudem in das bestehende Versorgungssystem integrieren lässt. Die Therapie machte es den Betroffenen nicht zuletzt möglich, mit ihrem verringerten Energiehaushalt umgehen zu lernen, und zugleich die verbliebenen Kapazitäten effektiv zu nutzen. Um den Patient:Innen wieder die Chance zur aktiven Teilhabe am gesellschaftlichen oder beruflichen Leben zu bieten, ist dies ein erster, wichtiger Schritt.
Die Habilitationsschrift mit dem Titel „, Sektorenübergreifende beanspruchungsgesteuerte multimodale Blended Therapy für Post-COVID-19-Patienten mit Fatigue und sensomotorischer Instabilität“ hat Professor Urban im Bereich Versorgungswissenschaft des Instituts für Medizintechnologie an der Brandenburgischen Technischen Universität Cottbus-Senftenberg eingereicht.
[2] Vgl. Urban, Thomas et al., Fatigue und sensomotorische Instabilität. Neurologisch kontrollierte Konversion von Post-COVID-19-Patienten, in: Nervenarzt (2024:95, S. 1104 – 1115), S. 1107
[3] „Die Fatigue wird durch eine subjektiv oft stark einschränkende, zu den vorausgehenden Anstrengungen unverhältnismäßige, durch Schlaf nicht aufzuhebende körperliche (insb. motorische), kognitive und/oder psychische Erschöpfung charakterisiert.“ (Vgl. ebd., S. 1106) Ein weiteres Merkmal ist das unabsehbare Auftreten der Erschöpfung, was wiederum den individuellen Energiehaushalt anbetrifft.
[4] Bei energetischer Verarmung, Fatigue und ähnlichen Krankheitsbildern wurde eher die Schonung der Betroffenen empfohlen.
[5] Die Beanspruchungsreaktionen können wiederum somatischer, kognitiver und auch emotionaler Natur sein. Ein Problem bei der Vermeidung der Crashs ist, dass es keine Verhältnismäßigkeit zwischen faktischer Belastung und der Auslösung der Zusammenbrüche gibt. Die technischen Möglichkeiten erlauben eine Belastungssteuerung in Echtzeit, was wiederum hilft, Zusammenbrüche zu vermeiden. (Vgl. ebd., S.1110)
[6] Ohne auf die Details der Auswertung hier weiter einzugehen, soll doch auf eine Problematik hingewiesen werden, an der wiederum die Herausforderungen therapeutischer Ansätze deutlich wird. So kam es bei Frauen zu einer Verschlechterung der sekundären psychosomatischen Symptome: Eine Erklärung hierfür ist der schnellere Verlauf der Therapie bei Männern und die sich daraus ergebende längere Beanspruchung bei Frauen, eine Selbstüberschätzung und ein ausweichendes Verhalten speziell junger Frauen. Therapien müssen diese Besonderheiten verstehen und reflexiv in ihren Behandlungen berücksichtigen, um die anderweitigen Erfolge nicht zu gefährden.
Die Zahl an Studienabbrüchen ist seit Langem hoch, gerade in den ersten Jahren geben viele Studierende ihr Studium vorzeitig auf. Die Gründe für diese Entscheidungen sind vielfältig und lassen sich nicht verallgemeinern. Auf der einen Seite beruhen sie auf gewonnenen Erfahrungen mit den jeweiligen Fachbereichen: Die individuelle Einsicht darin, dass Fachgebiete oder Methoden den eigenen Präferenzen nicht entgegenkommen, führt dazu, das Fach zu wechseln oder gänzlich andere Wege zu gehen. Andere Gründe für den Abbruch des Studiums sind dagegen vermeidbar: So stellt der Wechsel von der schulischen hin zur universitären, höheren Bildung viele junge Menschen vor Herausforderungen. Neben dem Umfeld ändern sich auch die Ansprüche an die Organisationsfähigkeit, das selbstständige Lernverhalten und nicht zuletzt die Komplexität der vermittelten Inhalte. Hier könnte eine mobile Lern-App Abhilfe schaffen.
Institutionen wie Hochschulen ist daran gelegen, die Zahl vermeidbarer Studienabbrüche zu minimieren. Eine mögliche Antwort holt die Studierenden gezielt in ihrem Alltag ab: Die Nutzung von mobilen Endgeräten ist aus dem Leben junger Erwachsener nicht mehr wegzudenken. Smartphones dienen nicht mehr nur allein der Kommunikation, sondern neben der Organisation und Navigation nun vermehrt auch dem Banking und vielen anderen Dingen. Kurzum: Die Geräte sind Teil des Alltags und der Umgang mit ihnen ist ebenso häufig wie intensiv. Anhand dieses Befundes lassen sich durchaus Potentiale absehen, die es nahelegen, diese Geräte zu nutzen, um Studierende zu unterstützen. Es stellt sich mithin die Frage, ob und wie sich eine mobile Lernapplikation dazu eignen könnte, die Anfangsphase des Studiums und seine Herausforderungen für die Betroffenen zu erleichtern und somit den Abbruch eines Studiums zu verhindern.
Von der Konzeption eines Anforderungsprofils…
Professor Florian Johannsen begann bereits in seiner Zeit an der Universität Bremen mit einem Team eine entsprechende App für den Bereich Wirtschaftswissenschaften zu entwickeln. Auch nach dem Antritt seiner Professur für Betriebliche Anwendungssysteme an der Fakultät für Informatik der HSM ist er weiter Teil dieses Projektes an der Bremer Universität. Auf Seiten des Lehrstuhls für Allgemeine Betriebswirtschaftslehre, Unternehmensrechnung und Controlling (Universität Bremen) besteht das Projektteam neben Professor Jochen Zimmermann, Dr. Martin Kipp, Dr. Johannes Voshaar und M.Sc. Janik Ole Wecks auch aus den Kollegen Prof. Thomas Loy (mittlerweile Universität der Bundeswehr München) sowie dem studentischen Mitarbeiter Patrick Heusmann. In mittlerweile fünf Publikationen präsentieren die Forschenden unterschiedliche Etappen der Entwicklung und folglich auch verschiedene Stufen der Implementierung der App „WiWiNow“.
Anwendungsbeispiel
Am Anfang stand die Frage, worin die Gründe für Studienabbrüche liegen und was die spezifischen Bedürfnisse und Herausforderungen von Studierenden am Beginn ihrer akademischen Laufbahn sind: Was sind die individuellen Motive und Situationen, die den Ausschlag für den Abbruch geben? Und wie kann ein App die Studierenden unterstützen, welche Funktionen und Features muss sie bieten? Wichtig ist hierbei die Einbeziehung der Betroffenen, da es genau um ihre Erfahrungen geht und sie am besten Auskunft darüber geben können, welche Angebote nicht nur nützlich wären, sondern auch tatsächlich genutzt werden. Dieser Punkt ist so trivial wie relevant: Beim Design einer App ist nicht nur die Funktionalität und die Usability zu beachten, sondern auch die Wahrscheinlichkeit einer regelmäßigen Nutzung. Es geht darum, die App als aktiven Teil in den Alltag zu integrieren, und so die nützlichen Effekte zu potenzieren. Aber der Reihe nach…
Am Beginn stand die empirische Evidenz, dass nicht nur der Bildungshintergrund einen Einfluss auf Erfolg und Misserfolg der höheren Bildungswege hat, sondern auch schlechte Erfahrungen im Studium selbst sowie psychologische Faktoren wie ineffiziente Lernstrategien oder der Mangel an Selbstorganisation (Vgl. Johannsen et al. 21, S. 1). Diese Kompetenzen werden in der Hochschulbildung vorausgesetzt, was einen großen Unterschied zum schulischen Kontext darstellt. Zugleich sind sie für so manchen Studierenden das umgangssprachliche Neuland. Die Abbruchquoten sind in der ersten Phase vergleichsweise hoch, zugleich haben Studien mit Blick auf das deutsche Bildungssystem einen Mangel an sozialer und akademischer Integration festgestellt, der zu den vermehrten Abbrüchen führt (Vgl. Johannsen et al. 23, S. 636f.). Diesen Herausforderungen der Transition-in-Phase[1] könnte eine App Abhilfe verschaffen, die nicht nur dazu dient, Seminar- und Vorlesungstermine zu koordinieren, sondern auch das Lernverhalten trackt und transparent macht sowie Wissen durch Übungen vertieft und über spielerische Elemente abruft.
… zur Entwicklung einer App…
Die erste Phase des Projektes befasste sich mit der Konzeption eines Prototyps anhand spezifischer Design-Vorgaben und mit der Taxierung eines technischen Rahmens: Die Fixierung von drei Meta-Anforderungen wurde in acht Design-Anforderungen überführt, welche die App erfüllen muss (Vgl. Johannsen et al. 23, Fig. 2, S. 639). Es ging also darum zu klären, was die App liefern soll, und was die beste technische Lösung wäre. Nach einer ersten Orientierung über das Design der Anwendung und einer Übersicht über die am Markt befindlichen Alternativangebote wurde eine Gruppe Studierender befragt, die sich im zweiten oder dritten Studienjahr befanden: Die Idee war, von deren Erfahrungen der Herausforderungen zu lernen, etwaige Lösungswege zu eruieren und schließlich Anforderungen an die App einzuholen. Eine zweite Umfrage zielte auf eine Gruppe von Lehrenden, die in engem Kontakt zu den Studierenden stehen und mit ihren Problemen vertraut sind. Zugleich verfügen sie über einen reichhaltigen Erfahrungsschatz des akademischen Alltags. Anhand dieser beiden Usergruppen wurden User Journeys beschrieben, also wie mögliche Anwender:innen mit der App umgehen und wie sie durch sie geleitet werden. Anhand des Prototyps konnten dann verschiedene Testphasen vollzogen werden, und sowohl das Front- als auch das Backend verbessert werden.
Nun war der Zeitpunkt da, die App unter realen Bedingungen zu testen. In einem verpflichtenden Einführungskurs zum Rechnungswesen im Wintersemester 2020/21 wurde die App den Studierenden zur Verfügung gestellt. Um Verzerrungen zu vermeiden, gab es keine Gratifikationen für die Teilnahme an der Studie. Wichtig zu erwähnen ist noch der Umstand der Pandemie und die Folge, dass der Lehrbetrieb ins Digitale verschoben wurde – was natürlich die Testbedingungen veränderte. Von den Teilnehmenden wurden sozio-demografische und strukturelle Daten abgefragt, die in die spätere Auswertung einfließen sollten. Hinzu kamen die Daten der App-Nutzung (u.a. Dauer der Nutzung und Quiz-Performanz), die Daten der Kursteilnahme (neben dem Kurs auch das begleitende Tutorium) und der akademischen Performanz (die Prüfungsleistung). Selbstredend wurden die Daten anonymisiert und dem Datenschutz genüge getan. Am Ende konnten die Daten von 575 Teilnehmenden in die Studie aufgenommen werden (Vgl. Voshaar et al. 22, S. 7).
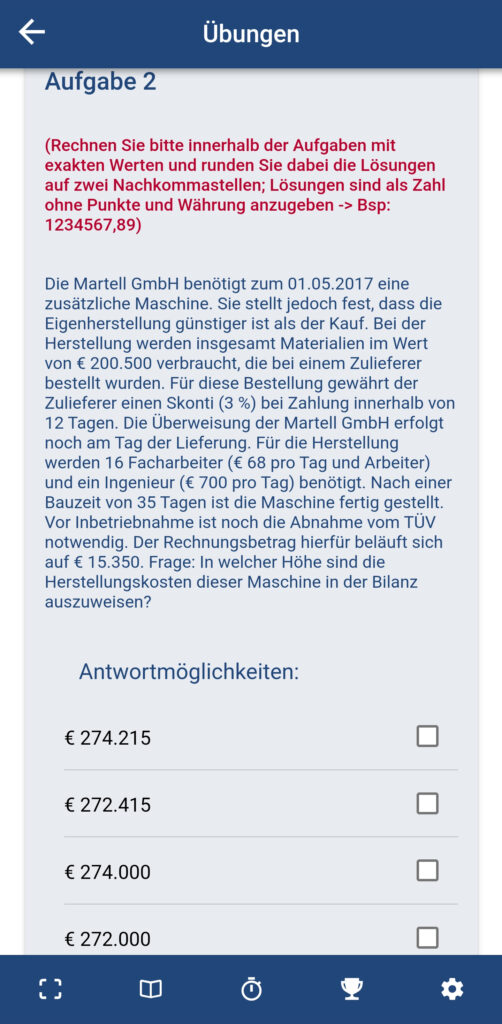
Screenshots der App
Im Ergebnis ließ sich festhalten, dass sich ein intensiverer Gebrauch der App signifikant positiv auf das Prüfungsergebnis auswirkt. Gerade weil die höhere Nutzung der App auch mit Faktoren der Besuche der Vorkurse und der Tutorien positiv korrelierte – und folglich unklar war, was der entscheidende Faktor der Leistungssteigerung war –, wurden weitere Untersuchungen nötig. Mit anderen Worten: Es blieb offen, ob die Nutzung der App selbst positive Effekte hatte oder ob leistungsstärkere bzw. motiviertere Studierende die App eher von sich aus nutzten, was den Einfluss der App verringern würde (Vgl. Voshaar et al. 22, S. 14). Nach der Korrektur mit Hilfe einer Kontrollvariable, die auf die Einflussfaktoren der Selbst-Selektion abgestimmt war, haben sich die ersten Ergebnisse aber als robust erwiesen. Nach diesen durchaus positiven Befunden konnten die Forschungen um die App weitergeführt werden.
… über die Bestimmung von Qualitätsdimensionen der Nutzung …
Ein weiterer Ansatz, der zu einer Veröffentlichung geführt hat, befasst sich mit den verschiedenen Qualitätsdimensionen der Akzeptanz, die eine Anwendung aufweisen kann und die mit ihrer Nutzung einhergehen. Hierbei wurden vier Qualitätsdimensionen ausgemacht, die von der App bedient werden sollten und die wiederum selbst in Unterkategorien aufgegliedert werden können: Geht es in der Systemqualität um die Art und Weise, wie die Informationen durch eine App aufbereitet werden, zielt die Servicequalität auf die angebotene Unterstützung ab. Die Informationsqualität wiederum umfasst die Evaluation der ausgegebenen Inhalte, wogegen die Qualitätsdimension des wahrgenommenen Vergnügens (perceived enjoyment) bei der Nutzung ebenso selbsterklärend wie eine für die Wiedernutzung relevante Kategorie ist (Vgl. Johannsen et al. 23, S. 641 – 644). Mit der Intension der Wiedernutzung und der wahrgenommenen Nutzer:innenzufriedenheit (perceived user satisfaction) schließen sich dann zwei Aspekte aus der User-Perspektive an, die wiederum mit unterschiedlichen Qualitätsdimensionen gekoppelt werden können und zugleich beide auf die Lerneffektivität als letzten Aspekt Einfluss haben.
Ein Ziel im Design der App war es, die Funktionalität und den Komfort kommerzieller Apps in der Strukturierung des Alltags mit universitätsbezogenen Inhalten, organisatorischen Funktionalitäten und spielerischen Elementen zu kombinieren (Vgl. Johannsen et al. 23, S. 638f.). Mit Hilfe der unterschiedlichen Qualitätsdimensionen lassen sich Stärken und Schwächen in der Nutzer:innenfreundlichkeit eruieren, was wiederum die Implementierbarkeit in den Alltag zumindest indirekt erhellt.
Im Ergebnis wurde eine Umfrage zu den Erfahrungen der Nutzung ausgewertet, an der sich zum Semesterende 131 Studierende beteiligten, wobei das eigentliche Sample aus unterschiedlichen Gründen (z. B. unvollständige Datensätze) 113 Studierende umfasste. In diese Auswertung flossen die vermerkten Qualitätsdimensionen ein, die in unterschiedlichen Items abgefragt wurden. Die System- und die Informationsqualität sowie die Qualitätsdimension des wahrgenommenen Vergnügens fördern die Nutzer:innenzufriedenheit, wobei die letzte Qualitätsdimension auch die Intension zur Wiedernutzung verstärkt. Die Lerneffektivität wird wiederum durch die Nutzer:innenzufriedenheit und die Intension positiv beeinflusst. Anhand dieser Daten konnte das Design der App und seine Erfüllung der Anforderungen überprüft und justiert werden (Vgl. Johannsen et al. 23, S. 651ff.). Ferner konnten vier spezifische Designprinzipien formuliert werden, die eine App bezogen auf die Transition-in-Phase beachten sollte: Neben einer Teilnahme-Management-Funktion bedarf es einer Kontrollfunktion des selbstständigen Lernens. Zudem muss eine plattformübergreifende Zugänglichkeit gegeben sein und die Inhalte einfach zu organisieren sein (Vgl. Johannsen et al. 23, S. 655f.).
… über die Verbesserung des Lernverhaltens …
In einer weiteren Studie, die auf der 44. Internationalen Konferenz zu Informationssystemen (International Conference on Information Systems – ICIS) in Hyderabad vorgestellt wurde, wird der Versuch unternommen, die App an etablierten Ansätzen der Lerneffektivität zu messen. Zwar wurde eine Verbesserung der Noten in den Abschlussprüfungen bereits nachgewiesen, dieser Aspekt ist aber nur ein Teilbeitrag zum Ziel, die Abbruchsquoten des Studiums zu senken. Das Konzept der fünf Erfolgsfaktoren studentischen Erfolgs hat Lizzio (2011) bezogen auf die Transition-in-Phase entwickelt: Die Erfolgsfaktoren sind die Verbundenheit (connectedness) z.B. mit dem akademischen Leben, die Fähigkeit (capability) der Selbstorganisation u.a., die Sinnhaftigkeit (purpose) z.B. akademischer Praxen, der Einfallsreichtum (resourcefulness) in der Koordinierung verschiedener Anforderungen und die Kultur (culture) im Sinne einer Wertschätzung der höheren Bildung. Der zweite Ansatz differenziert unterschiedliche Lernmodelle mit je eigenen Charakteristika: Neben dem oberflächlichen Lernen kann das strategische und zuletzt das tiefe Lernen angeführt werden (Vgl. Voshaar et al. 23, S. 3f.). Bleibt das erste Lernverhalten unfokussiert und ephemer, unterwirft sich das zweite Modell der Maxime der Effizienz und spricht dem Gelernten selbst keinen Eigenwert zu. Das tiefe Lernen wiederum lässt sich am ehesten als eigenständige Durchdringung der Wissensbestände erklären. Ziel war es zu erfahren, ob die App bzw. bestimmte Elemente helfen, die Herausforderungen der Transition-in-Phase zu meistern.
Die Auswertung der Studie ergab, dass die Nutzung der App die Sinne der Fähigkeit und des Einfallsreichtums positiv beeinflussen kann. Zudem verstärkt es das strategische und mindert das oberflächliche Lernverhalten. Die App hilft demnach bei der studentischen Selbstorganisation, fördert das eigenverantwortliche Lernen und die Einsicht in institutionelle Anforderungen in der höheren Bildung. Diese Potentiale sollten sich nutzen lassen, um die Quoten der Studienabbrüche zu verringern, werden Studierende doch über Angebote der App bei den ausgemachten Herausforderungen in der Anfangsphase des Studiums unterstützt.
In Kombination mit analogen Unterstützungsangeboten vor Ort haben die verschiedenen Komponenten der App unterschiedliche Potentiale der Unterstützung, die von der Selbstorganisation über die Prüfungsvorbereitung bishin zur Ausbildung einer studentischen Identität reichen. Gerade weil Defizite an effizienten Lernstrategien und dem Zeitmanagement enorme Potentiale an Frustration bergen, kann hier die App produktive Akzente setzen. Nicht zuletzt dienen die spielerischen Elemente der App der Motivation zur Wiedernutzung. Somit kann die App nicht nur die abgerufene Prüfungsleistung verbessern, sondern auch andere Impulse der Unterstützung setzen, die neben dem Lernverhalten auch die Selbstorganisation betreffen.
… bis zur Differenzierung verschiedener App-Features
In der jüngsten Studie befasst sich das Bremer Team zusammen mit Florian Johannsen mit der Frage, ob sich die einzelnen Komponenten der App anhand ihrer Effektivität differenzieren lassen. Diese Studie wurde auf der 45. Internationalen Konferenz zu Informationssystemen (International Conference on Information Systems – ICIS) in Bangkok vorgestellt. Zunächst konnte bestätigt werden, dass App-Nutzende ein signifikant besseres Ergebnis in den Prüfungen haben. Eine Unterteilung in verschiedene Nutzungstypen (Übungen, Quizze und Selbstorganisation) ergab keine nennenswerten Unterschiede hinsichtlich einer Verbesserung der Prüfungsleistung.
Prof. Florian Johannsen und Dr. Johannes Voshaar auf der Konferenz (Bildquelle: privat)
Die anschließende Forschungsfrage war, ob die Komponenten der App die Anforderungen und die Prinzipien des Designs unterschiedlich gut unterstützen. Festhalten lässt sich zunächst, dass alle drei App-Features die Leistung positiv unterstützen, mit einer Ausnahme: Die Beantwortung komplexer Fragestellungen wurden durch das Quiz-Feature nicht signifikant positiv gefördert. Das ist auch durchaus plausibel, zielen die Quizze doch auf die Abrufung von Wissensbeständen, und nicht auf deren Anwendung in diffizilen Fällen ab.
Relativ lässt sich sagen, dass die Übungsfunktion den stärksten Unterstützungseffekt hat, der zugleich über die verschieden Fragetypen stabil bleibt. Bei den einfachen Fragekomplexen, die Standardwissen abriefen, waren auch die Quizze für die Studierenden hilfreich. Das Selbstorganisationsfeature trägt zwar ebenfalls zur Verbesserung der Prüfungsleistung bei, aber in geringerem Ausmaß. Die Studierenden in der konkreten Studie profitierten also am meisten von der Übungsfunktion, wobei die Quizzes ergänzend für den Aufbau von Wissensbeständen nützlich waren. Die Selbstorganisationsfunktionen haben zwar einen relativ geringen Mehrwert für die Prüfungsleistung, ihre positiven Effekte könnten aber auf andere Weise entstehen und eher die grundlegende Identitätsbildung der Studierenden betreffen. Durch den Abgleich mit den beiden Designaspekten lassen sich Empfehlungen für App-Entwickler:innen, Studierende und Lehrende formulieren (Vgl. Voshaar et al. 24, S. 13f.).
Viele Fragen sind noch offen, so wird auch die Erforschung der Nützlichkeit einer mobilen Lern-App weitergehen. Neben der Frage der Zweckdienlichkeit der organisatorischen Features und ihrer deskriptiven Abbildung können auch die Komponenten der App in ihren positiven Effekten weiter aufgeschlüsselt und differenziert werden. Gerade weil neue Technologien wie das Smartphone nicht mehr aus dem Alltag wegzudenken sind, ist die Implementierung einer mobilen Lern-App sinnvoll und ihre Erforschung geboten, auch um den Bedürfnissen nach ort- und zeitunabhängigen Angeboten gerecht zu werden. Es geht bei den verschiedenen Lehr- und Lernformen eben nicht um ein Verhältnis der Konkurrenz, sondern der Komplementarität, also der gegenseitigen Ergänzung. Die Digitalisierung setzt auch hier neue Impulse, die in Technologien wie einer Lern-App produktiv aufgenommen werden können.
Literatur (chronologisch sortiert)
Lizzio, A. (2011), The Student Lifecycle: An Integrative Framework for Guiding Practice. Griffith University.
Johannsen, F; Knipp, M; Loy, T; Voshaar, J; Zimmermann, J (2021): A mobile app to support students in the „transition-in“ phase. Proceedings of the 29th European Conference on Information Systems (ECIS 2021), Research-in-Progress Paper.
Voshaar, J., Knipp, M., Loy, T., Zimmermann, J. and Johannsen, F. (2022), „The impact of using a mobile app on learning success in accounting education“, Accounting Education, Vol. No. pp. 1-26.
Johannsen, F., Knipp, M., Loy, T. et al. (2023): What impacts learning effectiveness of a mobile learning app focused on first-year students?. Inf Syst E-Bus Manage (2023). https://doi.org/10.1007/s10257-023-00644-0
Voshaar, J., Wecks, J.O., Johannsen, F., Knipp, M., Loy, T., Zimmermann, J. (2023): Supporting Students in the Transition to Higher Education: Evidence from a Mobile App in Accounting Education, Proceedings of the International Conference on Information Systems (ICIS 2023), Hyderabad, India.
Voshaar, J., Johannsen, F., Mkervalidze, S. and Zimmermann, J. (2024). Unbundling the App Advantage: Evaluating Exam Performance-enhancing Features of Mobile Learning Apps in Accounting. International Conference on Information Systems (ICIS 2024). Bangkok.
[1] Die Transition-in-Phase ist eine Etappe des Studierendenzyklus nach Lizzio (2011). Dieser unterteilte das Studium in verschiedene, teils vor- und nachgelagerte Phase, in denen sich unterschiedliche studentische Identitäten je nach genuinen Herausforderungen, Aufgaben und Status ergaben.
Im Winter werden die Tage kürzer, und so lässt es sich kaum vermeiden, im Dunklen zu reisen. Für Autofahrer und -fahrerinnen stellt sich dabei ein besonderes Problem: Nachts, vor allem auf monotonen Strecken wie Autobahnen, kommt es zu Ermüdungserscheinungen wie Schläfrigkeit und Unaufmerksamkeit, teils sogar zum kurzen Wegnicken. Diese Phänomene bergen offensichtlich ein immenses Risiko, für die fahrzeugführende Person ebenso wie für Dritte im Fahrzeug oder andere, unbeteiligte Verkehrsteilnehmer und Passanten. Die nicht geringe Zahl an Unfällen, deren Ursache auf Ermüdungserscheinungen zurückgeführt werden kann, ist eine Motivation für die Forschung und die Suche nach Lösungen.
Professor Martin Golz aus der Fakultät Informatik der Hochschule Schmalkalden widmet sich diesen Fragen aus dem Forschungsfeld der Biomedizintechnik: Um ein Phänomen zu vermessen, muss man sich über dessen Definition im Klaren sein. Zunächst stellt sich also die Frage, was Vigilanz ist und im Gegenzug, in welchen Formen Ermüdungserscheinungen auftreten.[1] Wichtig ist dabei, verschiedene Aspekte zu differenzieren und zugleich die entscheidenden Faktoren auszumachen. Es geht also darum, ein oder mehrere verlässliche Kriterien zu finden, anhand derer Ermüdungserscheinungen detektierbar sind. Eine zentrale Herausforderung für die Forschung ist dabei, dass es keine verbindliche Definition der Ermüdung oder ihrer Anzeichen gibt und in der Folge bislang belastbare und dezisive Attribute fehlen.[2] Wie vermessen wir also Merkmale von Ermüdung?
Was ist eigentlich Ermüdung und wie zeigt sie sich?
Eine Gelegenheit, dieser Frage nachzugehen, ergab sich im Rahmen einer Anfrage aus der Wirtschaft, konkret der Tagebauindustrie: Im Minenbetrieb gibt es eine rege Logistik per Lastkraftwagen, die im Schichtbetrieb arbeiten.[3] Mehrere Faktoren, die im Regelfall Müdigkeit befördern, kommen hier zusammen: Lange Fahrten, monotone Strecken, stetige Wiederholung. Die Belastung nimmt nochmals durch die harschen Umweltbedingungen wie hohe Temperaturen und geringe Luftfeuchte sowie Staub zu. Kurzum: Ein Knochenjob, dessen hohe physischen und psychischen Belastungen regelmäßig zu Unfällen aufgrund von Ermüdung führen. Politische und ökonomische Akteure haben aufgrund der körperlichen und wirtschaftlichen Schäden und Folgekosten ein hohes Interesse, diese Unglücke zu vermeiden.
In der Industrie hat in den letzten Dekaden ein Umdenken stattgefunden, mit dem die Sorge um die Fitness der Beschäftigten in den Fokus trat: Mit dem fatigue risk management haben Strukturen und Umgangsformen in den Betrieb Einzug gehalten, die helfen, mit Ermüdungserscheinungen offen und bewusst umzugehen, diese frühzeitig zu erkennen und damit Unfälle zu vermeiden. Ferner sollen Vorgesetzte auf das Phänomen und das Risiko aufmerksam machen und die Belegschaft sensibilisieren. Um die Sicherheit der Fahrenden weiter zu fördern, sind Monitoringtechnologien sinnvoll und zweckmäßig, die Müdigkeitserscheinungen und Schlafereignisse autonom erkennen und bestenfalls verlässlich Alarm schlagen, bevor es zu Unfällen kommt. Hier kommen zwei Dinge zusammen: Zunächst die Vermessung der Erscheinungsformen von Ermüdung, und zum anderen eine Prognose. Beide Punkte müssen in der Forschung mit unterschiedlichen Ansätzen verfolgt werden.
Monitoringsysteme
Um den Einsatz der Monitoringsysteme bewerten zu können, musste zunächst eine Auswahl unter den auf dem Markt verfügbaren Systemen getroffen werden. Neben Wissenschaftler:innen wurden auch Beschäftigte und Vertreter der Unternehmen hinzugezogen: Aus der Gewichtung verschiedener Faktoren entstand ein Koordinatensystem, mit dem sich drei Monitoring-Modelle als sinnvolle Testfälle ermitteln ließen. Diese drei haben einen ähnlichen technischen Aufbau: Sie werden auf dem oder im Armaturenbrett befestigt und sind mit einer Infrarotkamera ausgestattet.
Die Ermüdung messen sie nach dem PERCLOS-Maßstab: Dieser bezieht sich auf die Zeit, während das Auge achtzig Prozent vom Lid verdeckt ist. Für diese Messung erfasst die Kamera verschiedene Aspekte, die sie aber nur in der Kombination des PERCLOS auswertet. Neben der Öffnung der Augenlider wird die Lidschlussdauer und die Pupillenweite in die Auswertung sowie u.a. die Kopfbewegung miteinbezogen. Offen ist neben der Aussagekraft des PERCLOS-Kriteriums selbst, ob ein oder mehrere Aspekte schon für sich valide Aussagen über die Ermüdung treffen. Für das Monitoring ist wichtig, einerseits eine hohe Sensibilität zu ermöglichen, andererseits aber möglichst Fehlalarme zu vermeiden, da dies wiederum die Akzeptanz verringern würde. So darf das Augenschließen bei blendendem Gegenverkehr eben nicht zum Alarm führen. In dieser Abwägung muss ein gangbarer Weg in der Anwendung gefunden werden.
Testfahrten im Labor
Aufgrund des Risikos verbieten sich Tests in Realsituationen. In der Folge griff Professor Golz auf eine computergestützte Fahrsimulation zurück, die die Vermessung von Ermüdungserscheinungen unter kontrollierten Bedingungen erlaubt. Zunächst galt es, die Testobjekte auszuwählen: Aus einer Vielzahl an Bewerbungen aus der Studierendenschaft der Hochschule Schmalkalden wurden mehrere geeignete Personen ausgewählt, um an dem Test teilzunehmen. Um die Ermüdung wahrscheinlicher zu machen – Ziel war ja deren Vermessung –, mussten die Partizipierenden einen bestimmten Tag-/Nachtrhythmus einhalten, ein Schlafprotokoll führen, auf Schläfchen am Tage verzichten und am Tag der Messung selbst wachhaltende Getränke wie Kaffee meiden. Simulierte Testfahrten wurden den realen Arbeitsroutinen der Kraftfahrer:innen des Tagebaus nachempfunden. Von 23:30 bis 08:30 mussten die sechzehn Teilnehmer:innen mehrere Einheiten von vierzig Minuten fahren. Das Testumfeld und die Testbedingungen waren so gehalten, dass sie Müdigkeit befördern: Die Strecke war monoton, es gab keinen Straßenverkehr und keine Ablenkung während der Fahrt. Zusammenfassend waren die wichtigen Kriterien der Studie, die Ermüdungserscheinungen wahrscheinlicher machen sollten: Time since sleep, time on task, time of day und das Monotonie-Empfinden.
Aufnahme aus dem Fahrsimulator (Quelle: Martin Golz)
Als Referenz zur ermittelten Müdigkeit wurde auf zwei etablierte Maßstäbe zurückgegriffen, die unabhängig von den anderen Werten funktionieren und somit als Kontrollvariablen dienen konnten: Zum einen die Selbsteinschätzung über den Grad der momentanen Müdigkeit, der in den Pausen zwischen den Fahrten abgefragt wurde (Karolinska sleepness scale). Zur Messung der subjektiv empfundenen Ermüdung hat sich diese neun-stufige Skala in der Wissenschaft als durchaus verlässlich erwiesen. Zum anderen die Position des Fahrzeugs auf der Straße: Ermüdungserscheinungen führen dazu, dass die Fahrzeuge die Fahrbahnmitte häufiger verlassen. Ein Übertritt über Fahrbahnmarkierungen lässt sich leicht ermitteln. Beide Kriterien sollen die Grundlage für die Bewertung der Monitoring-Systeme bilden. Als weitere Quelle der Vermessung wählte Professor Golz die EOG- und EEG-Signale, also die Augen- sowie die Hirnaktivität.
Wir kennen die Bilder des EEG zumeist aus dem Fernsehen: Ein Geflecht von Kabeln wird über einen Kopf gelegt und an verschiedenen Punkten Kontakt mit der Kopfhaut hergestellt. Über diese Kontakte lassen sich geringste Potentiale eines elektrischen Strömungsfeldes messen und folglich die Aktivität im Hirn in gewissem Maße nachvollziehen. Je nach Menge der Kontakte entstehen dann Aufzeichnungen einer Vielzahl an Wellen, die dem Laien nichts sagen. Die Auswertung dieser Diagramme ist eine höchst komplexe Angelegenheit und verlangt viel Erfahrung. Nur so lassen sich aus den Verschiebungen der Wellen, ihren Frequenzen und Amplituden und je nach Hirnareal differenzierte Rückschlüsse führen. Eine Frage ist, ob sich Ermüdungserscheinungen über dieses Verfahren exakt ermitteln lassen, bzw. ob eine Prognose eintretender Ermüdung möglich ist.
Erhebung und Auswertung der Daten
In einem ersten Schritt wurden die Daten der beiden unabhängigen Messungen mit den PERCLOS-Erhebungen der drei Monitoring-Systeme verglichen. Die Korrelation der PERCLOS-Werte mit den objektiven Messungen hielten nur oberflächlich stand: Sobald die zeitliche Auflösung feiner wird oder nur die Daten eines Individuums herangezogen werden, verlieren sich die hohen Korrelationswerte. Zusammenfassend ergaben sich signifikante inter- und selbst intrasubjektive Unterschiede über die Maßstäbe hinweg.
In einem zweiten Schritt versuchte Professor Golz zu klären, ob die EEG-Messungen als Referenz für eine Validierung der videobasierten Systeme zu dienen vermögen. Um hier eine Datenanalyse vornehmen zu können, wurde beide Messwerte simultan erhoben, und die Datensätze anschließend mithilfe der unabhängigen Variablen in starke und schwache Ausprägungen der Ermüdung unterteilt. Eine nichtlineare Diskriminanzanalyse sowohl der PERCLOS- als auch der EEG/EOG-Zeitreihen zeigte ein Defizit des PERCLOS, in hoher zeitlicher Auflösung zwischen schwacher und starker Ermüdung zu unterscheiden.
Aus diesen Ergebnissen ließ sich folgern, dass die Monitoringsysteme zwar unter Laborbedingungen gut arbeiten, hierfür aber wichtige Konditionen erfüllt sein müssen: Neben einer niedrigen zeitlichen Auflösung müssen die Daten vor der Auswertung möglichst über viele Personen hinweg gemittelt werden. Offen ist, ob die Messdefizite an der Ausrichtung der Systeme am Normalverhalten der Augenbewegung liegt, wodurch untypische Ausprägungen nicht oder falsch detektiert würden. Jedenfalls erwies sich das EEG/EOG-Signal als deutliche robustere Maßgabe zur Ermittlung der Ermüdung.
Am Ende lässt sich festhalten, dass der Weg hin zu funktionierenden Monitoringsystemen von Ermüdungserscheinungen noch ein weiter ist. Ein Problem ist dabei, dass bislang keine Klarheit darüber herrscht, wie sich Ermüdung zeigt, was also generalisierbare Kriterien und Messobjekte sind. PERCLOS hat hierbei nur sehr bedingt überzeugen können. Und da es in diesem Bereich buchstäblich um Leben und Tod geht, bedarf es mehr Forschung, um geeignete Maßstäbe für Monitoringansätze zu liefern.
Die Prognose von Mikroschlafereignissen
Auch wenn das EEG durchaus verlässlich Ermüdungserscheinungen detektieren kann, bleibt doch das praktische Problem bestehen, dass die Ermittlung der Daten aufwendig ist und sachverständiger Expertise bedarf. Um breitenwirksame Akzeptanz zu erhalten, müssen andere technologische Lösungsansätze gefunden werden. Das Forschungsfeld der Neuroinformatik hat hier also noch genügend Aufgaben. Gerade die Prädiktik, also die Prognose kritischer Ermüdungserscheinungen, birgt soziale und ökonomische Relevanz.
In einem anderen, aktuelleren Projekt widmete sich Professor Golz zusammen mit seinem Team der Vorhersagbarkeit von Mikroschlafereignissen unter zu Hilfenahme von EEG-Signalen.[4] Die Herausforderungen bestanden wiederum in der Komplexität der Signalcharakteristik und der hohen inter-individualen Variabilität, also unterschiedlichen EEG-Eigenschaften je nach Person. Die Idee war, die Amplituden des EEG durch fünf Methoden der Zeitreihenvorhersage zu analysieren. Neben der prädiktiven Qualität ging es auch um die Eignung verschiedener Messpunkte des EEGs, also welches Hirnareal sich besser bzw. schlechter für die Messungen eignet.
Professor Golz bei der jüngsten Vorstellung seines Forschungssemesterberichts
Die Daten entstammten verschiedenen Testfahrten im Schmalkalder Labor, die unter den gleichen Bedingungen entstanden sind wie jene der Ermüdungserscheinungen. Durch die Verwendung der Messwerte von 79 jungen, gesunden Personen konnte auf eine große Datenmenge zurückgegriffen werden. Auch wenn sich ein Modell der Zeitreihenprognose durch eine geringe Fehleranzahl hervortat, wurde klar, dass jeder EEG-Kanal andere Parameterkombinationen zu seiner optimalen Verwendung bedurfte.
Infolge dieser Komplexität sind Prognosen schwierig, gerade wenn der Zeithorizont mit fünf Sekunden angesetzt wird. Auch eine adaptive Klassifikationsanalyse, die dem dynamischen Charakter der Signale gerechter werden sollte, hatte zwar im ersten Schritt hohe Genauigkeiten, konnte diese Ergebnisse aber nicht in der Validierung reproduzieren. Die Leistungsfähigkeit der Vorhersage ist abschließend also vorhanden, aber noch recht gering. Um hier Verbesserungen zu ermöglichen, könnten optimierte Datensätze ebenso verwandt werden wie moderne Methoden, die auf künstliche Intelligenz zurückgreifen und dem dynamischen Charakter der Daten entsprechen. Am Ende kann jede Verbesserung der Prognostizierbarkeit helfen, Leben zu retten. Somit ist es sinnvoll, an der Erkennbarkeit von Ermüdung weiter zu forschen. Das Fahrsimulationslabor und das Archiv der gewonnenen Datensätze ist hierfür eine ideale Ausgangsbasis.
[1] Vigilanz stammt vom lateinischen vigilantia, das „Wachsamkeit“ und „Fürsorge“ meint. Vigilanz bezeichnet einen Zustand andauernder Aufmerksamkeit bei eintöniger Reizfrequenz und ist umgänglich ein Synonym von Wachheit, einem Aspekt des Bewusstseins. Für die Untersuchung der Vigilanz misst man die Fähigkeit einer Person zur Daueraufmerksamkeit.
[2] Die uneindeutige Verwendung der Begriffe Müdigkeit, Fatigue und Erschöpfung ist Teil des Problems. In der Forschung wird mittlerweile dafür plädiert, die drei Begriffe als distinkte Phänomene auf einem Kontinuum zu fassen, die in Relation gesetzt werden können. Vgl. Matti, N., Mauczok, C. & Specht, M.B. (2022): Müdigkeit, Fatigue und Erschöpfung: Alles das Gleiche oder Ausprägungen eines Kontinuums? – Ein Diskussionsanstoß. Somnologie – Schlafforschung und Schlafmedizin 26, 187-198.
[3] Golz, M., Sommer, D., Trutschel, U., Sirois, B., Edwards, D. (2010): Evaluation of fatigue monitoring technologies. Somnologie – Schlafforschung und Schlafmedizin 14, 187-199.
[4] Schneeweiß, L., Pauli, M. P., Golz, M. (2023): EEG-Vorhersage zur Prognose von Mikroschlaf, in: Stolzenburg, F., Reinboth, C., Lohr, T. & Vogel, K. (Hrsg.): NWK 2023 – Tagungsband der 23. Nachwuchswissenschaftler*innenkonferenz, Harzer Hochschultexte Nr. 14, Hochschule Harz, Wernigerode, 176-183.
Mit der Sammlung von Daten, dem umgangssprachlichen Gold unseres Zeitalters, haben wir uns schon oft befasst. Die Unmenge an Datenmaterial, die infolge der Digitalisierung unter anderem der industriellen Produktion und Teilen der menschlichen Kommunikation zur Verfügung steht, eröffnet unserer Gegenwart völlig neue Wege und Tiefen der Analyse. Kurzum erlauben es die Expansivität moderner Sensorik und die Steigerung der Rechenleistung und Verarbeitungskapazitäten, große Mengen an Informationen aufzunehmen, zu ordnen und Erkenntnisse aus den gesammelten Daten zu gewinnen.
Mit dieser Entwicklung erlangt der spezifische Forschungsbereich der Data Analytics immer mehr an Bedeutung. Hierbei geht es um die Werkzeuge, die Technologien und Prozesse, mit deren Hilfe Muster, Verläufe und Problemlösungen gestützt auf ein Konvolut an Daten ermittelt werden können. Neben der eigentlichen analytischen Auswertung ist die Sicherung der Qualität der Datensätze und eine effiziente Archivverwaltung für die weiteren Schritte elementar.
Können elektrische Schafe halluzinieren?
Mit der Verbreitung KI-gestützter Technologien traten Phänomene in den Fokus der Öffentlichkeit, die der Data Analytics thematisch nahestehen: Infrage steht vereinfacht formuliert, ob zum Beispiel Chat GPT lügen kann. Bei manchen Anfragen kam es zu Ausgaben, die schlicht falsch waren, unter anderem ganz offensichtlicher Fehlurteile wie die Anzahl bestimmter Buchstaben in einem Wort. Dieses Phänomen wurde als Halluzination beschrieben und erhielt einige Aufmerksamkeit: Die Ermittlung der Ursache der Fehlausgabe hatte das Problem der Komplexität des Programms, aber nicht nur der Architektur der künstlichen Intelligenz mit seinen Legionen an Knotenpunkten und Schichten, sondern auch in Hinsicht der Datenmengen und deren komplexer Verwaltung. Letzterer Aspekt zielt auf die Archivstrukturen und den Umgang mit den riesigen Datenmengen und -banken, die großen Sprachmodellen wie Chat GPT für den Trainingsprozess zugrunde liegen.
Neben der Frage, warum diese Fehler überhaupt aufkamen, war auch offen, an welchen Zeitpunkt sie entstanden. Die Programme selbst waren selbstredend nicht zur Ausgabe falscher Antworten angehalten, gleichwohl verlangt der Umgang mit der natürlichen Sprache und manche Formen der Anwendung eine gewisse Qualität der Kreativität, also der Dehnung und Übertragung, die die Programme leisten müssen. Zum Beispiel bei dem Wunsch, den dritten Akt von Romeo und Julia in der Sprache modernen Ostküsten-HipHops zu reformulieren – ein solches Werk existiert bislang nicht, das Modell muss also selbst kreativ werden um diese Anfrage zu beantworten. Es werden große Anstrengungen unternommen, die Anzahl der Halluzinationen von Modellen zu minimieren, was auch die Relevanz zeigt, wie Daten verwertet und verarbeitet, Datensätze gereinigt oder auch korrumpierte Daten aussortiert oder gerettet werden. Und weiter, wie komplexe Technologien mit einem Gros an Datensätzen interagieren. Und hier setzt die Data Analytics an.
Was ist Data Analytics?
Die Data Analytics befasst sich mit der Analyse von Daten und deren Auswertung zu unterschiedlichen Zwecken. Sie ist ein multidisziplinäres Forschungsfeld zwischen der Informatik, der Mathematik und der Statistik sowie weiterer Bereiche, die produktiv verknüpft werden. Generell lässt sich die Data Analytics in vier Ansätze unterteilen: Die deskriptive Analyse versucht zu beschreiben, welche Veränderungen bereits geschehen sind. Dagegen zielt die diagnostische Analytik auf eine Erklärung, warum etwas wie passiert ist. Die letzten beiden Zugänge schlagen eine andere Richtung ein: Aus den Daten Prognosen über zukünftige Entwicklungen abzuleiten ist das Ziel der prädiktiven Analysen. Diese Prognose wird im Falle der präskriptiven Analytik noch durch die optimale Reaktion ergänzt. Die unterschiedlichen Ansätze verfolgen nicht nur verschiedene Ziele, sie gehen auch anders mit den Daten um und haben differenzierte Ansprüche an die Daten.
Seit gut zwei Jahren hat Constantin Pohl die Professur für „Data Analytics“ an der Fakultät für Informatik der Hochschule Schmalkalden inne und nutzt die Gelegenheit seiner Antrittsvorlesung, ein Licht auf verschiedene Facetten seiner Forschung und seiner Lehre zu werfen. Bereits in seiner Dissertation befasste er sich mit der Frage, wie sich moderne Hardware zur Beschleunigung von Datenbank-Anfragen optimal nutzen ließe. Anders formuliert war das Thema, wie Datenverwaltungen strukturiert und organisiert sein müssen, um Ressourcen und Kapazitäten bedarfsgerecht zu nutzen und Suchanfragen effizient zu verarbeiten. Die Datenmengen auf Servern nehmen einerseits beständig zu und macht Suchvorgänge aufwändiger und langsamer, zugleich erlauben die vielen Kerne moderner Prozessoren über das Multithreading parallele Verarbeitungen. So gilt es, Managementsystem für Datenbanken und Datenströme zu entwickeln, die den neuen Anforderungen gerecht werden und zudem die technischen Möglichkeiten optimal nutzen.
Öl-Druck und Reparaturzyklen
In einem zurückliegenden Forschungsprojekt widmete sich Constantin Pohl der Frage, wie KI-Modelle für die Wartung von industriellen Anlagen und Maschinen wie einem Druckluftkompressor genutzt werden können. Das Ziel ist, Wartungsarbeiten an Verschleißteilen nicht mehr an fixen Zeitpunkten oder nach Werkzeugausfällen anzusetzen, sondern vorausschauend anhand konkreter und in Echtzeit erhobener Daten der laufenden Maschinen. Um diese Optimierung zu realisieren ist eine Prognose wichtig: Anhand von Sensordaten sollen Aussagen über die Zukunft getroffen werden, zum Beispiel das ein Filter noch 22 Stunden halten wird, bevor er gewechselt werden sollte. Hieran ließen sich dann entsprechende Reparaturmaßnahmen orientieren.
Die Ausgangsbasis sind wieder verschiedene Sensoren, welche die Maschinen anhand unterschiedlicher Parameter vermessen. In dem konkreten Projekt wurden 26 Merkmale sensorisch erfasst, neben der Temperatur und der Ölqualität auch der Differenzdruck zwischen verschiedenen Filtern. Bevor mit diesen Daten aber Aussagen getroffen werden können, mussten die Algorithmen anhand der Ausfälle der Kompressoren trainiert werden. In Regressionsmodellen wurden unterschiedliche vorverarbeitete und ausgewählte Datenmengen genutzt, um Ausfälle vorherzusagen. Wichtig ist dabei zu verstehen, dass es hier nicht um eine Größe wie die Temperatur ging, um diese Prognose zu machen: Die Modelle berücksichtigen viele Daten und ihre Verläufe, auch über eine längere Zeit, und verknüpften diese zugleich. Diese komplexen Berechnungen sind die spezifischen Leistungen der KI-Modelle, die zur Erkennung von Mustern und Strukturen sowie Abweichungen geeignet sind.
Am Ende des Projektes ließ sich die Prognostizierbarkeit grundsätzlich umsetzen. Mit einem entwickelten Ölsensor und der Nutzung der regulären Sensorik konnten die fehlerhaften Vorhersagen auf 0,09% reduziert werden. Auch die maximalen Abweichungen waren bei einer Gesamtzahl 158.000 Vorhersagen nur in einem Fall bei sechs Tagen und ansonsten bei einem Tag. Der entscheidende Faktor für die erfolgreiche Ermittlung und Prognose ist der Ölsensor.
Datenströme
Neben dieser Thematik befasst sich Professor Pohl auch mit Fragen des Stream Processing: In der Datenverarbeitung lassen sich zwei Ansätze unterscheiden, die sich für verschiedene Anwendungen und Ziele eignen. Der klassische Weg ist die Paketlösung: In einem bestimmten Zeitraum werden Daten erfasst und dann als Block archiviert. Im Anschluss können diese Daten verarbeitet und ausgewertet werden. Offensichtlich ist hierbei die große Latenz, also die Zeitspanne, die zwischen der Messung und den Ergebnissen einer Auswertung steht. Das Stream Processing zielt dagegen auf die Auswertung der Datenströme in Echtzeit, wobei durch diesen Fokus andere Imperative der Verarbeitung wichtig werden.
Die Analyse von Datenströmen steht vor der Herausforderung, eine permanente Aufnahme und Verarbeitung zu gewährleisten. Die Auslastung muss so gestaltet werden, dass durch die Interaktion verschiedener Komponenten keine Flaschenhälse oder Stausituationen entstehen. Kurzum geht es darum, effiziente Strukturen zu etablieren, die eine möglichst permanente und effiziente Verteilung und Verarbeitung erlauben und die Kapazitäten entsprechend nutzen.
Constantin Pohl befasst sich mit der Entwicklung und Erprobung von Stream Processing Engines. Im konkreten Fall ging es um die Vorhersage des Zielhafens und der Ankunftszeit. Die pendelnden Schiffe geben während ihren Reisen permanent Informationen weiter, zum Beispiel über ihre Position, ihre Geschwindigkeit und den Schiffstyp, die in einem komplexen Modell für Vorsagen ihrer Zielhäfen genutzt werden können. Kurzum bietet sich so die Möglichkeit, über eine Einschätzung einer komplexen Sachlage mit vielen Akteuren und zu beachtenden Parametern Strategien der Optimierung der Zielhäfen zu entwickeln.
Fußstapfen
Constantin Pohl hat bislang noch eine Juniorprofessur an der Hochschule Schmalkalden, die im Rahmen des bundesweiten Projektes „FH-Personal“ geschaffen wurde. Mit seiner Berufung wurde die Professur von Martin Golz zu einer Schwerpunktprofessur, die es diesem erlaubt, das Lehrdeputat zu senken und sich vermehrt der Forschung zu widmen.
Professor Pohl kann seine Arbeit in einem laufenden Lehr- und Forschungsbetrieb aufnehmen und den Lehrstuhl intensiv kennenlernen. Ziel ist es, die Reibungsverluste zu minimieren und durch geteilte Wege strukturelle Kontinuitäten zu etablieren. Er unterrichtet neben Grundlagen der Daten- und Wissensverarbeitung auch Deep Learning Architekturen und Wissensentdeckung in Datenbanken. Als Mitglied im Prüfungsausschuss der Fakultät Informatik widmet er sich gemeinsam mit den anderen Mitgliedern den Problemen der Studierenden in Prüfungsangelegenheiten. Auch am Hochschulinformationstag und dem Absolvententreffen stellte er sich und seine Forschung dem interessierten Publikum vor.
Mitte Juni durfte die Hochschule Schmalkalden den Tag der Ingenieurwissenschaften unter dem Titel „risING. Regionale Innovationen, globale Transformationen“ ausrichten. In einem ganztägigen, abwechslungsreichen Programm präsentierten sich die Thüringer Ingenieurwissenschaften zugleich sich selbst und der interessierten Öffentlichkeit. In Vorträgen konnten sich verschiedene Projekte aus Forschung und Lehre vorstellen und Nachwuchswissenschaftler:innen in einem Pitchwettbewerb beweisen. Abgerundet wurde das Programm durch eine Präsentation aller eingereichten Poster und eine Ausstellung von Kooperationspartnern im Foyer. Prägend in allen Hinsichten blieb die thüringenweite, kooperative Ausrichtung der Ingenieurwissenschaften, die auch ein Markenkern der Allianz Thüringer Ingenieurwissenschaften darstellt.
Die Allianz THÜR ING ist ein Bündnis von sieben Thüringer Hochschulen mit ingenieurwissenschaftlichen Studiengängen, das es sich zu Aufgabe gemacht hat, die Bekanntheit der Ingenieurwissenschaften in der Öffentlichkeit zu steigern. Ziel dieser Kooperation ist es zudem, junge Menschen für das Studium der Ingenieurwissenschaften zu begeistern und zu diesem Zweck die Vielfalt der Studiengänge, die Anwendungsnähe und die innovative Relevanz hervorzukehren. Ab von vielen weiteren wissenschaftskommunikativen Offerten sind es die Tage der Ingenieurwissenschaften, die eben solche Impulse setzen sollen. Neben der Allianz THÜR ING unterstützte die Thüringer Ingenieurskammer das Organisationsteam der Hochschule Schmalkalden bei der Umsetzung des Tages, zum Beispiel bei der Bewertung der Pitches und der Preisverleihung am Ende der Veranstaltung.
Um was es geht: Die Relevanz der Ingenieurwissenschaften
In seiner Begrüßungsrede wies Professor Gundolf Baier, Präsident der Hochschule Schmalkalden und Sprecher der Allianz THÜR ING, auf die verschiedenen gesellschaftlichen Herausforderungen unserer Gegenwart hin, auf welche die Ingenieurwissenschaften innovative Antworten finden müssten und auch würden: Neben der Demographie seien dies die Digitalisierung und die Dekarbonisierung – kurz die großen D‘s. Gerade im Falle der letzten beiden Herausforderungen werden die Potentiale der Ingenieurwissenschaften deutlich: Die techno- und ökologischen Transformationsprozesse prägen bereits unsere Gegenwart und unseren Alltag von der Kommunikation über Behördengänge bis hin zu Einkäufen, und werden dies in Zukunft wohl immer stärker tun. Darüber hinaus spielen die D’s aber auch eine immer größere Rolle für die Wirtschaft und den Standort Deutschland.
Hochschulen angewandter Wissenschaften nehmen die letzten beiden Impulse gesellschaftlicher Transformationen in ihrer Forschung auf und versuchen, neben ebenso relevanten Aspekten von Grundlagenarbeiten, anwendungsnahe Lösungsansätze für Gesellschaft und Wirtschaft zu entwickeln. Diese Implementierbarkeit ihrer Forschungsarbeiten und die Arbeit an konkreten Problemen ist ein gewichtiges Pfund, die mehr in die Wahrnehmung der Öffentlichkeit gerückt werden soll.
Anlässe wie die Tage der Ingenieurwissenschaften lassen sich nutzen, um mit der Öffentlichkeit in Kontakt zu treten und diese über die Tätigkeiten und die Sinnhaftigkeit der Ingenieurwissenschaften zu informieren: Was sind die Themen der Ingenieur:innen, vor welchen Herausforderungen stehen sie und wie gehen sie mit den Aufgaben um? Welche Bereiche umfasst das ingenieurwissenschaftliche Spektrum und wie gestalten sich die internen und externen Austauschbeziehungen, zum Beispiel zu den Forschungseinrichtungen von Unternehmen? Wie lassen sich Patente einrichten, Start-Ups gründen oder Forschungsdaten in der wissenschaftlichen Community teilen? Der Tag der Ingenieurwissenschaften nutzte die Gelegenheit, um ein Licht auf diese verschiedenen Aspekte zu werfen.
risING: Impulse der Politik
Der Tag der Ingenieurwissenschaften steckte sein thematisches Portfolio bereits in seinem Titel „risING. Regionale Innovationen, globale Transformationen“ ab. Einerseits wird hierbei ein Bezug zur RIS-Strategie der Landesregierung hergestellt, die wiederum auf eine regionale Innovationsstrategie abzielt: Im Hinblick auf verschiedene Felder und thematische Komplexe rund um Zukunftsfragen wurden Akteure der Thüringer Forschungslandschaft anhand ihrer Schwerpunkte und Kompetenzen markiert. Das Ziel ist, dass die beteiligten Institutionen und Personen zu verknüpfen und den Austausch an Wissen und Expertise anzuregen, um und so schließlich die Forschung gemeinsam voranzutreiben. In Kooperationen lassen sich die Potentiale ganz unterschiedlicher Akteure und Regionen Thüringens produktiv nutzen, so die dahinterstehende Idee. In einem kleinen Bundesland wie Thüringen kann Forschung keine One-Man-Show sein, vielmehr legen die kurzen Wege eine enge, produktive Zusammenarbeit und die intensive Vernetzung nahe.
Kooperative Projekte sind in der Forschungslandschaft zwar keine neue Erscheinung, doch nimmt die Zusammenarbeit von Hochschule, außeruniversitären Forschungseinrichtungen und Partnern aus Wirtschaft und Gesellschaft immer mehr zu. Da sich so die verschiedenen Schwerpunkte unterschiedlicher Akteure einbringen und die Beteiligten die Heterogenität der Forschungslandschaft gewinnbringend nutzen können, bieten sich diese Kooperationsprojekte zur Präsentation ingenieurwissenschaftlicher Aktivitäten und deren interdisziplinärer Potentiale an.
Forschungsprojekte: Intelligente Mobilität und 3D-Elektronik-Systeme
Am Tag der Ingenieurwissenschaften konnte Professor Frank Schrödel von der Hochschule Schmalkalden die hochschulübergreifende Forschungsgruppe vernetztes und kognitives Fahren, kurz CoCoMobility, vorstellen. Neben der HSM sind die Fachhochschule Erfurt, die Technische Universität Ilmenau und die Bauhaus-Universität Weimar an diesem Forschungsprojekt zum Thema intelligente Vernetzung moderner Mobilität beteiligt. Die Vielfältigkeit der Kooperationspartner spiegelt die Differenziertheit der hier einbegriffenen Themen: Neben der intelligenten Verkehrsinfrastruktur und der Vernetzung von Fahrzeugen, Infrastruktur und Testumgebungen arbeitet die Forschungsgruppe an Effekten auf den Verkehr, Aspekten der Sicherheit sowie an Einflüssen der Umwelt.
Die Umsetzung der neuen Mobilität angefangen beim autonomen Fahren bis hin zur smarten Verkehrslenkung bedarf der Kommunikation, zum Beispiel zwischen den Mobilen und der Infrastruktur. An dieser intelligenten Konnektivität forscht der Projektpartner TUI. Die BUW fokussiert sich auf den Ablauf des Verkehrs, also Fragen der Vorhersagbarkeit und u.a. individuell als angenehm empfundener Abstände. Die Steigerung der Verkehrssicherheit vulnerabler Gruppen steht im Blickfeld der FHE. Und die HSM widmet sich der menschenzentrieten autonomen Entscheidungsfindung im Kontext der autonomen Mobilität. In diesem kooperativen Forschungsprojekt können die unterschiedlichen Partner ihre Expertise einbringen.
Professor Roy Knechtel nutzte die Gelegenheit, um den neuen Forschungsschwerpunkt 3D-Elektronik-Systeme der Hochschule Schmalkalden vorzustellen. Die Welt der Mikroelektronik ist noch heute weitgehend eine Scheibe, sind doch jene dünnen Siliziumscheiben, die sogenannten Wafer, die Grundbausteine. Dennoch lässt sich ein Trend hin zur Dreidimensionalität feststellen: Um die Funktionen moderner smarter Geräte wie Handys oder Uhren erfüllen zu können, müssen Chips, Sensoren und andere technische Komponenten in die dritte Dimension wachsen: Kurzum geht es darum, hochkomplexe Bauteile zu stapeln und zu verbinden, um so immer kompaktere, effizientere Komponenten zu erzeugen und den Erfordernissen von Funktionalität, Formfaktor, Passgenauigkeit und Rentabilität gerecht zu werden.
Das Ziel des Projektes ist die Herstellung komplexer mikroelektronischer Bauteile direkt auf dem wafer, um so auch die Wertschöpfung einer bislang recht globalisierten Industrie vor Ort halten zu können. Um die für diese Bauteile notwendige Präzision erreichen zu können, muss ein Fokus auf den Materialien und der Strukturanalyse ihrer Charakteristika liegen. Neben Martin Seyring aus dem Team von Roy Knechtel ist mit Stephanie Lippmann von der FSU Jena und dem dortigen Otto-Schott-Institut für Materialforschung im Projekt für diese Aspekte eingebunden. Aber auch Unternehmen wie X-Fab beteiligen sich als Partner aus der Wirtschaft an diesem Forschungsschwerpunkt.
Nachwuchs: Die vielen Facetten der Ingenieurwissenschaften
Am Tag der Ingenieurwissenschaften gab auch dem akademischen Nachwuchs in unterschiedlichen Hinsichten Raum: Schon vor Längerem gab es einen Call for Poster, der um Einreichungen zu innovativen Themen der Thüringer Ingenieurwissenschaften aufrief. All diese eingereichten Poster wurden im Rahmen einer Präsentation per Slideshow gezeigt und gaben während der Pausen zu Gesprächen Anlass. Zudem wählte eine Jury aus den Einreichungen zwölf aus, die dann am Tag der Ingenieurwissenschaften ihr Poster in einem Pitch vorstellen konnten. Am Ende der Veranstaltung wurden wiederum durch eine Jury, unter anderem mit Vertreter:innen der Ingenieurskammer besetzt, die besten drei Pitches ausgewählt und die Gewinner mit einem Preisgeld bedacht.
Hier ist nicht genügend Platz, alle Beiträge eingehend zu würdigen, daher muss eine Synopsis genügen. Alle Pitches werden in Bälde auf dem Youtubekanal der Allianz THÜRING verfügbar sein, alle Poster sind auf der Seite der Hochschule Schmalkalden im Bereich Forschung zu finden. Zudem werden die Präsentationen, sofern möglich, ebenso auf diesen Seiten veröffentlicht.
Martin Patrick Pauli von der Hochschule Schmalkalden verdeutlichte die Folgen des Data-Leakage-Problems, welches bei dem Training von KI-Algorithmen mit Daten auftreten kann. Letztlich kann es dabei zu überoptimistischen Annahmen der Trefferquoten und damit zu einer Verzerrung der Ergebnisse kommen. Um diese nur scheinbare Lösung zu vermieden, gilt es ebenso aufmerksam gegenüber den Daten und ihrer Aufbereitung zu bleiben wie es nützlich ist, auf verschiedene Kontrollmethoden in der Datenverarbeitung zurückzugreifen.
Christian Diegel von der Technischen Universität Ilmenau stellte in seinem Pitch ein Verfahren vor, beim dem es um eine Optimierung des Laserstrahlschweißens geht. Infolge der hohen Prozessgeschwindigkeit lösen sich aus dem Schmelzkanal Spritzer ab, die dann wieder mehr oder weniger aufwändig entfernt werden müssen. Durch die Addition einer Nebenintensivität nahe dem zentralen Laser ließe sich das Schmelzbad vergrößern und so die Dynamik des Materials verringern, wodurch es wiederum weniger Ablösungen gäbe, so der Ansatz. Durch die Einbringung von Tracer-Teilchen ins Material konnte mithilfe von Hochgeschwindigkeits-Röntgenuntersuchungen die Fluidität des Materials beobachtet und Wege zur Optimierung des Laserschweißens gefunden werden.
Tobias Tefke stellte den Aufbau eines Ethical-Hacking-Labors inklusive einer Capture-the-flag-Umgebung vor, die den Studierenden der Informatik an der Hochschule Schmalkalden helfen soll: In virtuellen Arbeitsumgebungen geht es darum, mögliche Schwachstellen in der Infrastruktur von Softwaresystemen zu finden und die Lücken in der Sicherheit zu schließen. Hier verknüpfen sich also Ansätze der Informatik und der Didaktik.
Analoger nimmt sich das Projekt von Lucas Hauck, ebenfalls von der Hochschule Schmalkalden, aus: Er geht den technischen Herausforderungen, den Möglichkeiten und Grenzen der additiven Fertigung elektronischer Bauteile im dreidimensionalen Raum nach. Der 3D-Druck besticht dabei durch ein Angebot vieler Verfahren und die mögliche Verwendung unterschiedlicher Materialien sowie die Aufbringbarkeit auf multiple Untergründe. Hauck geht diesem Komplex anhand eines 3D-Druck-Systems nach, wobei dessen Flexibilität der möglichen Verfahren das Angebot denkbarer Lösungswege vervielfacht und übersichtlich macht. Um den Aufwand individueller Ansätze zu minimieren, soll ein grundlegender Verfahrenskatalog entwickelt werden, der den Umgang mit solchen Geräten über Designregeln standardisieren und vereinfachen soll.
Wie können Drohnen und künstliche Intelligenz die Bauindustrie unterstützen? In ihrem Pitch umriss Lisa Schneeweiß das Projekt BauKiRo, das sich neben der Aufzeichnung des Baufortschritts auch dem Vergleich der realisierten Bauausführung mit dem Bauplan widmet. Dieser Kooperation der HSM mit der FAU Erlangen-Nürnberg steht vor den Herausforderungen des Einsatzes von Drohnen in komplexen Umgebungen und KI-unterstützten Auswertung von Videoaufnahmen und dem Abgleich mit vorliegenden Plänen. Der Zweck dieses Projektes ist unter anderem, Baumängel frühzeitig zu erkennen.
Sreekar Babu Malli vom ThIWert, dem Thüringer Innovationszentrum für Wertstoffe, befasst sich im Projekt SeRo.inTech mit innovativen Technologien, wertvolle Rohstoffe aus Abfällen zu gewinnen. Er stellte das Kooperationsprojekt der HSN mit der BUW am Beispiel von Sperrmüll vor: In der üblichen Entsorgung von Abfällen bleiben Teile an verwertbaren Materialien und Rohstoffen ungenutzt. Das Projekt versucht unter anderem, die die großen Bestandteile an Holz im Sperrmüll aufzubereiten. Daran schließt sich eine Verteilung der Objekte nach Qualität und möglicher Weiterverwendung an. Ziel ist es, einen möglichst abgeschlossenen Kreislauf der verwendeten natürlichen Rohstoffe zu realisieren und selbst qualitativ minderwertige Materialien nachhaltig zu nutzen.
Michael Werner von der Hochschule Schmalkalden stellte das Innovationslabor KIOptiPak vor, das wiederum ein Teil des KI HUB Kunststoffverpackungen ist. Ziel dieser Kooperation verschiedener Partner aus Wissenschaft und Wirtschaft ist es, Kunststoffverpackungen so zu gestalten, dass die Wiederverwertbarkeit maximiert und die Kunststoffabfälle von Verpackungen minimiert werden. Das KIOptiPak zielt dabei auf die Frage, wie Verpackungen designt sein müssen, um dieses Ideal eines Kreislaufs zu erreichen, zum Beispiel im Hinblick auf das verwendete Material und die direkte Einbeziehung von Vorgaben des Recyclings. Werners Interesse lag dabei auf der Qualität des wiederaufbereiteten Kunststoffreziklats und dem Umgang mit Schwankungen des Materials in der Verarbeitung. Diese Erkenntnisse sollen dann in KI-Modelle einfließen, die anhand der Vermessung des verwandten Materials schon bei laufender Produktion Angaben über die Güte und Verwendbarkeit des Produkts geben können.
Ein Thema, das Aspekte von Forschung und Transfer mit einem didaktischen Ansatz verknüpft, stellte Carsten Gatermann von der TUI vor: Ausgangspunkt war die Frage eines Schülers, ob sich eine vertikale Windenergieanlage auch in Privathaushalten installieren ließe. Neben den elektrotechnischen Fragestellungen galt es, der kreativen Neugier des Schülers Raum zu lassen: Wie müssen Projektarbeiten gestaltet werden, um den individuellen Freiraum der Forschung mit der notwendigen Unterstützung und Orientierung zu verbinden? Der Ansatz „Knowledge on Demand“ trennt Themen in Teilaufgaben, zwischen denen sich die Beteiligten immer wieder abstimmen: Weil das selbstständige Arbeiten von den Schülern erst erlernt werden muss, wird die eigenständige Forschung mit einem engen Betreuungsverhältnis ergänzt. Je nach individuellem Vermögen können dann die Aufgaben dann frei oder gesteuert angegangen werden.
Wie lässt sich der natürliche Rohstoff Holz weiter nutzen? Daniela Pachatz von der HSM stellte drei Anwendungsbeispiele aus dem Projekt FiWood vor, in dem um die Integration von Funktionen in Schichtholzprodukten geht. Ein Projekt ist ein Sitzpult, in das verschiedenen Funktionen wie eine Heizung und Sensoren (Temperatur und u.a. Luftfeuchte) eingelassen sind. Die Wärmefunktion ist auch Teil von Bodenheizelementen, die über die Abgabe von Infrarotwärme den Effekt der thermischen Behaglichkeit erreichen sollen. Nicht zuletzt lassen sich auch LED-Arrays in den Furnieren integrieren, und so leuchtende Holzelemente herstellen.
Walpola Perera von der FHE ist Teil des Forschungsprojektes Kimono-EF, das die Mobilität beeinträchtigter Menschen im Stadtraum sicherer machen will. Weil die Grünphasen von Ampelanlagen oftmals zu kurz sind, um betroffenen Menschen eine vollständige Überquerung der Straßen oder Straßenbahnschienen zu erlauben, soll hier innovative Technologie Einzug halten. Zunächst werden mit KI-optimierten Erfassungssystemen wie Kameras Personen frühzeitig ausfindig gemacht, die einen längeren Zeitraum für die Querung benötigen könnten, zum Beispiel Personen in Rollstühlen oder mit Kinderwägen. Anschließend werden die spezifischen Grünphasen verlängert und die anderen Verkehrsteilnehmer informiert. Weiter gedacht könnte mit Hilfe dieser Benachrichtigungssysteme auch eine intelligente Verkehrssteuerung autonomer Fahrzeuge ergänzt werden.
Einen Ansatz, die Photolithographie mit extremem ultraviolettem Licht zu verbessern, stellte Niranjan Kannali Ramesha von der HSM vor. Moderne Computerchips werden durch ein spezifisches Verfahren hergestellt, das sich als Buchdruck mit Licht umschreiben ließe. Auf dem Wafer, also einer Siliziumscheibe, wird eine photosensitive Schicht aufgetragen und dann durch eine Maske hindurch dem Licht ausgesetzt, wodurch sich hochkomplexe und kleine elektronische Bauteile wie Transistoren aufbringen lassen. Der bestimmende Faktor der Größe der Bauteile ist momentan die Wellenlänge des Lichts, wodurch sich der Einsatz extremen ultravioletten Lichts erklärt. Um die Produktionskapazität zu steigern, müssen kraftvollere EUV-Quellen als die bislang genutzte Variante über Zinnkügelchen gefunden werden. Das Projekt ging dem Ansatz nach, das EUV von Freien-Elektronen-Lasern wie dem FLASH als Quelle zu nutzen. Zentral ist hierbei die Frage, ob und wie sich das EUV-Licht in einem Fokuspunkt konzentrieren lässt, wofür wiederum die Erfassung der Wellenfront eine entscheidende Rolle spielt. Im Weiteren brauche es optische Systeme, die Abweichungen der Wellenfont korrigierten.
Martin Sennewald (TUI) stellte abschließend einen Aspekt des Forschungsprojektes DimFSW vor, das darauf abzielt, die Beschädigungen von Werkzeugen bei Schmelzschweißverfahren wie dem Rührreibschweißen abzuschätzen und das Aufkommen von Ausfällen von Produktionsabläufen zu minimieren. Die Fügetechnik stehe grundsätzlich vor steigenden Herausforderungen, unter anderem aufgrund wachsender Ansprüche der Bauteilkomplexität, dem Leichtbau und der Qualität. Zum Beispiel verlangt die Elektromobilität weitaus komplexe Bauteile als die bisherigen Modelle. Für die Fertigung folgen hieraus nicht nur die Wirkung hoher Prozesskräfte, sondern auch ein erhöhter Verschleiß der Werkzeuge. Wie lässt sich dieser Verschleiß so bestimmen, dass Ausfälle in laufenden Produktionsprozessen vermieden werden können? Der Ansatz ist, auf die tatsächlichen Prozesskräfte und -momente wie der vorliegenden Spannungen am Schweißstift im Prozess zurückzugreifen, wobei diese aus den Kraft-/Drehmomentdaten gewonnen werden.
Nachhaltigkeit und Netzwerke, Daten und Patente
Neben diesen konkreten Forschungsvorhaben gab der Tag der Ingenieurwissenschaften auch Projekten Raum, die Forschung und Lehre strukturell verbessern wollen. Mit ThüLeNa präsentierten die Professoren Frank Pothen (EAH) und Matthias W. Schneider (HSM) ein jüngst gestartetes Projekt, das sich dem Aspekt der Nachhaltigkeit im Lehren und Lernen widmet und dies stärken will. Dieser Nachhaltigkeitsgedanke umfasst Aspekte der Entwicklung neuer Technologien ebenso wie eine soziale und ökologische Verantwortung sowie die Einholung sozialer und ökonomischer Akzeptanz. Das Ziel von ThüLeNa ist es, die Ingenieurwissenschaften auf diese Herausforderungen auf verschiedenen Ebenen vorzubereiten und die Transformation produktiv zu begleiten, und zum Beispiel die Nachhaltigkeit in Lehrformaten zu integrieren und bereits vorhandene Strukturen und Kompetenzen zu stärken.
Wie lässt sich die Forschung und Entwicklung in Thüringen kooperativ verknüpfen? Das Thüringer Zentrum für Maschinenbau nimmt sich dieser Aufgabe an, wie Dr. Andreas Patschger in seinem Vortrag deutlich machte. Das ThZM ist eine Kooperation aus fünf Forschungseinrichtungen, u.a. der TUI und der HSM, das sich neben wirtschaftspolitischen Impulsen vor allem dem Wissens-Transfer hin zu kleinen und mittleren Unternehmen verschrieben hat. Es geht also darum, gefundene Lösungen in die Anwendung zu bringen und hierzu Institutionen der F&T mit den zentralen Akteuren, also Unternehmen, in Kontakt zu bringen. Beide Seiten können hierbei voneinander lernen. Ein weiterer Ansatz des ThZM ist zudem die Netzwerkarbeit, um die Akteure in Austausch zu bringen, zum Beispiel in Formaten wie der Cross-Cluster-Initiative Thüringen. Hierin tauschen sich kleine und mittlere Unternehmen über ihre Erfahrungen, Bedarfe und gemeinsamen Interessen aus, was zukünftigen Kooperationsprojekten ebenso den Weg ebnet wie es den Partnern einen Überblick in geteilte Problemlagen erlaubt. Nicht nur können die Beteiligten so von best-practise-Beispielen profitieren, sondern auch mögliche Kooperationspartner in der Nachbarschaft kennengelernt werden.
Eine andere Frage ist die der Forschungsdaten, wobei hier nicht nur an die Statistiken empirischer Sozialwissenschaften zu denken ist, sondern auch an die massiven Datenmengen, die zum Beispiel im Maschinenbau per Sensoren an den Werkzeugen erhoben werden. Da diese Informationen mit viel Aufwand gewonnen werden, ist es sinnvoll und von einem allgemeinen wissenschaftlichen Interesse, die erhobenen Daten zu teilen, im Kreise der Wissenschaft oder auch in der Öffentlichkeit. Um Wissenschaftler:innen bei diesen Projekten zu unterstützen wurde mit dem FDM-HAWK eine Initiative des Forschungsdatenmanagement ins Leben gerufen, deren Mitarbeiter:innen auf verschiedenen Feldern helfen können. Wie Sarah Boelter (EAH Jena) hervorhob, fängt dies bereits bei grundsätzlichen Dingen wie dem Datenschutz- und der -sicherheit an, geht über den planvollen Umgang mit Daten und ihrer Erhebung schon im Vorfeld und reicht bis in Detailfragen wie den passenden Metadaten, verlässlichen Plattformen und den kompatiblen Formaten der entsprechenden Daten.
Ein anderer Punkt sind die Patente: Jan Axel Schleicher gab einen Einblick in seine Tätigkeit und die Aufgabe von PATON, dem Landespatentzentrum Thüringen. Letztlich ist es das Ziel, unter anderem Wissenschaftler:innen dabei zu unterstützen, Patente zu beantragen und die verschiedenen Fallstricke einer solchen Anmeldung zu vermeiden. Welche Kriterien müssen erfüllt werden, um ein Patent anmelden zu können? Hier ist unter anderem an den Stand der Technik zu denken, dessen Mängel und das Potential der Erfindung, wobei hier wiederum zwischen der Aufgabe und der Lösung der Erfindung geschieden werden kann. Nicht zuletzt stellte Schleicher den Ablauf einer Patentanmeldung vor, um eventuell Betroffenen eine Orientierung zu geben.
Sven Uwe Büttner vom StarterWerk gab einen Überblick über die Dos and Don’ts von Existenzgründungen: Was braucht es eigentlich, um erfolgreich von einer Idee zu einer Unternehmung zu gelangen? In das Zentrum stellte Büttner das kreative, engagierte Individuum, das eine Idee verwirklichen will. Neben der Definition einer Baseline, der Perzeption des Marktes und der Interessen potentieller Kund:innen ging es um die Nutzung wichtiger Kontaktnetzwerke und die Fokussierung gepaart mit einer Offenheit, die den Weg zum Ziel nicht weniger gerichtet, nur etwas breiter werden lässt.
Ein Fazit
Am Ende des Tages konnten die Gäste, die Referierenden und das Organisationsteam auf einen erfolgreichen, informativen Tag der Ingenieurwissenschaften zurückblicken, der verschiedene Aspekte der Thüringer Ingenieurwissenschaften beleuchtete und der zugleich ebenso für die Öffentlichkeit wie für Wissenschaftler:innen lohnenswerte Inhalte bereithielt.
Die Veranstalter wollen zum Abschluss allen Beteiligten danken, die im Vorfeld oder am Tag selbst mit ihrem Engagement für das Gelingen beitrugen.
In der zweiten Septemberhälfte fand das Science Camp zum Thema RoboBau an der Hochschule Schmalkalden statt. Über sieben Tage hinweg wurde Wissenschaft mit Experimentierfreude und Ingenieurwissenschaft mit interdisziplinärer Kooperation kombiniert. Insgesamt 25 Masterstudierende aus verschiedenen Fächern und mit unterschiedlichen Schwerpunkten wie Robotik, Elektrotechnik und dem 3D-Druck mussten ihre jeweiligen Fähigkeiten zusammenbringen und zugleich kreativ verknüpfen, um das Ziel des Wettbewerbs zu erreichen. Diese Kooperation zwischen Studierenden über die Grenzen verschiedener Disziplinen und Hochschulen hinweg ist die grundlegende Intention der Science Camps.
Die Idee der Science Camps geht auf eine Initiative der Allianz Thüringer Ingenieurwissenschaften zurück, also der übergreifenden Kooperation von Ingenieurstudiengängen verschiedener Thüringer Hochschulen. So setzt sich auch das Teilnehmerfeld nicht nur aus Studierenden unterschiedlicher Fachrichtungen der Ingenieurwissenschaft zusammen, die Teilnehmenden kommen auch aus verschiedenen Thüringer Hochschulen. Es ist dieser integrative, kooperative Ansatz gemeinsamer Problemlösungen, der im Zentrum der Allianz ThürIng steht. An der Hochschule Schmalkalden koordinierten Miriam Naujoks und Frederike Mohr die Konzeptionierung und Umsetzung des Science Camps. Unterstützt wurden sie und die Teilnehmenden insbesondere durch Prof. Schrödel als fachlichen Leitern sowie durch studentische Hilfskräfte.
Leitthemen und Ablauf
Das leitende Motiv dieses Camps war der RoboBau. Die Aufgabe der vier Teams war es, zunächst eine Brücke bestehend aus verschiedenen Bauelementen digital zu konstruieren und anhand eines 3D-Druckers zu fertigen. Anschließend musste die Brücke von einem Robotergreifarm zusammengesetzt werden. Auch wenn die entscheidenden Kriterien Stabilität und der effiziente Einsatz von Materialien waren, wurde die Kreativität der Aufbauten gewürdigt.
Der Donnerstag stand ganz unter dem Eindruck des Ankommens. Nach der Begrüßung durch den Vizepräsidenten für Studium und internationale Beziehungen, Prof. Dr. Uwe Hettler, stellte Frederike Mohr den Tagesablauf vor. Anschließend gab es eine Campusführung inklusive mehrerer Laborbesuche und ein gemeinsames Mittagessen. Am Nachmittag wurden die ersten thematischen Pflöcke eingeschlagen. Dr. László Dunaivon dem Department of structural engineering der Budapest university of technology and economics führte in die Thematik des Brückenbaus aus architektonischer Perspektive ein und stellte Grundprinzipien möglicher Aufbauweisen vor, an denen sich die Teilnehmenden am Science Camp orientieren konnten. Danach gab Prof. Abrahamczyk von der Bauhaus-Universität Weimar einen Überblick über die genaue Aufgabe und stellte die Teams vor. Den Tag rundete ein gemeinsames Grillen der knapp dreißig Teilnehmer aus fünf Hochschulen ab.
In den nächsten Tagen wurden verschiedene Crash-Kurse abgehalten. Neben Prof. Frank Schrödel, der die Studierenden u.a. in die Themen der Intelligent Robotics und Roboterprogrammierung einführte, gab Prof. Hartmut Seichter eine Übersicht in die Programmiersprache Python sowie in das Thema der Bildverarbeitung. Prof. Andreas Dietzel vermittelte einen ersten Eindruck in das Konstruieren mithilfe von Computern (CAD). Auch wenn der selbstständigen Arbeit der Master-Studierenden möglichst viel Raum gelassen werden sollte, wurde zwecks praktischer Veranschaulichung und kurzweiliger Ablenkung am Mittwoch eine Exkursion zu dem Unternehmen Mehnert – Experts for Special Machines 4.0 mit Sitz in Erfurt unternommen.
Auszeichnungen und Resümee
Auch wenn es bei derartigen kooperativen Projekten nicht im Mittelpunkt steht, gab es natürlich auch ein Gewinnerteam, dem die Brückenkonstruktion am überzeugendsten gelang. Herr Muralidhar Appana (Schmalkalden), Frau Arti Rana (Schmalkalden), Frau Rohini Kulkarni (Nordhausen), Frau Quratulain Siddiqi (Weimar), Herr Jakob Pflugbeil (Ilmenau) und Herr Jash Roopesh Shah (Jena) gewannen zudem den zweiten Wettbewerb, der die kreativste Lösung prämierte.
Dem Resümee Prof. Schrödels von der Fakultät Maschinenbau der Hochschule Schmalkalden ist nichts hinzuzufügen: „Es war inspirierend zu sehen, mit welchen hohen Maß an Begeisterung die Studierenden am Science Camp 2023 teilgenommen haben. So löcherten die Studierenden die beteiligten Dozenten mit vielen Fragen und tüftelten nicht nur bis spät abends, sondern auch am Wochenende in den Robotik Laboren der Hochschule Schmalkalden. Am Ende des Science Camp waren alle Studierenden in der Lage ein wirklich vorzeigbares Ergebnis stolz zu präsentieren – was mich wirklich begeisterte! Ich freue mich aufs nächste Science Camp!!“
Natürlich lässt sich doch noch etwas hinzufügen: Das nächste Science Camp wird im Frühjahr 2024 an der FH Erfurt stattfinden.
Die autonome Beförderung in selbststeuernden Fahrzeugen scheint uns mittlerweile eine vertraute Vision einer nicht mehr allzu fernen Zukunft. Unzählige Akteure aus verschiedenen Bereichen von akademischer Wissenschaft über kommerzielle Projekte von Unternehmen aus der Wirtschaft bis hin zu Programmen der öffentlichen Verwaltung sind damit beschäftigt, diese neuen Formen der individuellen Mobilität zu konzipieren und ihre technische sowie rechtliche Realisierung intensiv voranzutreiben. Weit weniger Aufmerksamkeit erhalten dagegen kleinere autonom operierende Systeme, sogenannte Mikromobile, die auf Fuß- und Radwegen fahren. Diese kleinen Transportfahrzeuge bringe Waren selbststeuernd von Punkt a zu Punkt b, säubern die Umgebung oder bringen E-Roller zu Mietstationen zurück. Sie sorgen für Entlastung, indem sie zum Beispiel Senior:innen bei ihren alltäglichen Erledigungen unterstützen. Zwar ähneln sich manche der Herausforderungen zu jenen des autonomen Fahrens, es bestehen in diesem Bereich aber auch gänzlich eigene ingenieurwissenschaftliche Fragestellungen.
Im Projekt „RoboTraces. Robots are in town“ erschließt eine Gruppe von Forschenden also ein bis dato wenig beachtetes Transportmittel, das sich als ein Element im Transformationsprozess der modernen Mobilität und des Warenverkehrs ausnimmt. Prof. Sebastian Zug von der Technischen Universität Bergakademie Freiberg und Prof. Frank Schrödel von der Hochschule Schmalkalden gehen dabei nicht nur Fragen der technischen Umsetzung nach, ihr Ansatz weist ferner eine Erweiterung der Perspektive um eine rechtliche und sozialwissenschaftliche Dimension gerade in Hinsicht des praktischen Gebrauchs der Roboter und deren alltäglichen Interaktionen mit Menschen auf.
Workshop in Freiberg
Die kooperative Interdisziplinarität, die sich auch an den Arbeitsfeldern der beteiligten Wissenschaftler:innen ablesen lässt, dient dazu, die autonome Mikromobilität aus differenzierten Blickwinkeln zu beleuchten. Hierzu müssen unter anderem zwei Perspektiven, die sich wesentlich unterscheiden, verschränkt werden: Die Sicht der Mikromobile und die Sicht der Umwelt. Dies meint, dass sowohl die technischen Herausforderungen und infrastrukturellen Bedingungen der autonomen Logistik im Fokus stehen wie die Akzeptanzkriterien der Gesellschaft im Umgang mit den Robotern. Aus dieser Anlage wird klar, wie breit gefächert der Katalog an Aufgaben und Themen ist, denen sich die Beteiligten in dem Projekt widmen.
Das Ziel ist der Weg
Anders als die autonomen Fahrzeuge des Individualverkehrs sollen sich die Mikromobile zumeist nicht auf Straßen bewegen, sondern auf den Fuß- und Radwegen unserer Innenstädte und Wohnviertel. Sie befahren mithin Bereiche der Öffentlichkeit, auf denen sich Passant:innen auf je eigene Weise fortbewegen, mal langsam und mal schnell, mal gerade und mal mäandernd usw. Zwei Aufgaben kommen zusammen: Einerseits müssen sich die Roboter selbst steuern können und die Fähigkeiten haben, sich auf unterschiedlichem Terrain zu orientieren und Hindernisse zu erkennen sowie diese zu überwinden. Andererseits bewegen sich die Fahrzeuge in einem geteilten Raum, in welchem sie auf andere Verkehrsteilnehmer reagieren müssen. Letzteres ist ein diffiziles Problem, da diese Einschätzung untern anderem eine Qualität der Prognose, also die Abschätzbarkeit menschlichen Handelns, verlangt.
Konfiguration der Robotor
Wie die autonomen PKWs müssen die Roboter auf ihre Umwelt achten und etwaige Gefahrenquellen erkennen, um sich möglichst sicher in dem engen, geteilten Raum der Innenstädte fortbewegen zu können. Die Transportroboter sind so zu programmieren, dass sie stoppen, sofern absehbar ein Risiko auftritt; und eben dafür müssen sie Bewegungsabläufe in einem gewissen Maße voraussehen können, also was die eventuellen nächsten Schritte sein könnten oder was es für Folgen hätte, wenn die Person spontan anhalten würde. Für diese Einschätzung bedarf es einer großen Mengen an Daten des Verhaltens von Passant:innen im öffentlichen Raum, die bislang in der benötigten Form und Qualität nicht vorliegen.
Die grundlegende Intention des Forschungsprojektes ist es, die für die Akzeptanz zentralen Parameter des Einsatzes autonomer Lieferroboter im öffentlichen Raum wie Größe, Geschwindigkeit und Abstand zu bestimmen und zudem über eine systematische Datenerhebung Interaktionsmuster und objektive Rahmenbedingungen zu konkretisieren. In zwei prototypischen urbanen Testgebieten in Gera und Freiberg wird der Einsatz der Roboter bis zum Herbst 2023 erprobt und zugleich die Reaktion der Umgebung, also der Umgang der Passant:innen mit den Robotern, gesichtet und wissenschaftlich ausgewertet. Durch die langfristige Anlage der Testphasen können verschiedene Szenarien von Licht- und Wetterverhältnissen bis hin zum unterschiedlichem Aufkommen von Passant:innen einbezogen und somit das Bild der gewonnen Daten diversifiziert und vervollständigt werden. So entsteht eine belastbare Datenlage, die weiteren Forschungsvorhaben als sicherer Ausgangspunkt dienen kann.
Die Schwere des scheinbar Leichten
Die Konstruktion solcher Roboter und die Automatie ihrer Bewegung im Raum ist dabei alles andere als ein unterkomplexes Problem. Nur als ein Beispiel wird hier auf die Herausforderung der räumlichen Wahrnehmung kurz eingegangen. Zunächst erkennen Transportroboter ihre Umwelt – neben anderen Sensoren – wenig überraschend mit Hilfe von Kameras. Aber schon wird es schwierig und wir Menschen müssen uns von unserem Zugang zur Welt trennen: Die von den Kameras erzeugten Bilder sind zunächst zweidimensionale Flächen, denen die dritte Dimension, also der Raum, fehlt. Wir müssen uns dies als ein klassisches Foto denken, auf dem alles zunächst auf einer Ebene liegt. Um hierin weitere Dimension wie den Raum und die Zeit einzutragen, die beide für das Abschätzen von Bewegungen zentral sind, bedarf es wiederum technischer Lösungen.
Austausch beim Workshop
Ein Weg, die dritte Dimension zu integrieren, ist die Verwendung zweier Kameras und eine daran anschließende computergestützte Verarbeitung. Durch die so gewonnene Räumlichkeit lassen sich Distanzen und Bewegungen einschätzen, auch wenn es hierfür wiederum komplexer Prozesse der Datenverarbeitung bedarf, was wiederum einen Zusatz an technischem Aufwand mit sich führt. Zugleich sind im Straßenverkehr das Tempo und die Genauigkeit der Berechnung relevante Faktoren um Unfälle vorab zu vermeiden. Was also zunächst einfach klingt – die Wahrnehmung der Umwelt – entpuppt sich als eine komplizierte technische Aufgabe.
Teile des Ganzen
Zum einen befassen sich die RoboTracers mit der technischen Realisierung der Transportroboter: Wie müssen diesen für den urbanen Raum aufgebaut und gestaltet sein, um ihre Aufgaben optimal erfüllen zu können? Neben Fragen der Größe, der möglichen Reichweite und Traglast geht es auch um die Rahmenbedingungen der Infrastruktur, die in Hindernissen wie Bordsteinen, Schrägen und Löchern sowie fehlender Beleuchtung bestehen können. Auf was, für welche Situationen muss ein Lieferroboter im Zweifel vorbereitet sein? Auch Fragen wie jene der benötigten Breite der Wege spielen hier eine Rolle.
Testfahrt in Freiberg
Zum anderen geht es dem Projekt um die Erhebung von Daten, die den Einsatz der Roboter unter realistischen Bedingungen abbilden und als Grundlage für die weitere Entwicklung dienen können. Die Frage ist, welches Set an Sensoren hier die notwenigen Daten über die Umgebungserfassung und das Verhalten der Passanten liefern. Ferner bedarf es komplexer Bearbeitungsprozesse, um aus einer reinen, ungeordneten und im Zweifel recht umfänglichen Sammlung an Daten nutzvolle Informationen zu selektieren.
Der dritte Teil stellt dann die Mensch-Maschinen-Beziehung in ihr Zentrum: Wie lassen sich Kriterien und Parameter eines subjektiven Sicherheitsgefühls in ein tragfähiges Akzeptanzmodell überführen? Wie müssen die Roboter aussehen und wie sollten sie sich bewegen, um einerseits nicht als potentielles Risiko oder eine Gefahrenquelle wahrgenommen zu werden und andererseits im Fußgängerverkehr nicht unterzugehen? Um sich der Interaktion zwischen Passant:innen und den Mikromobilen anzunähern, werden die Testfahrten begleitet und die Reaktionen der Umgebung videographisch festgehalten, um in einem nächsten Schritt ausgewertet zu werden. Wie es grundlegende Ansätze der Forschung an sich haben, bedarf es auch hier zunächst der Entwicklung von Maßstäben und Kriterien der Bewertung, um über diese dann weitere, vertiefende Studien ausführen zu können.
Testfahrt in Freiberg
Nicht zuletzt geht es dem Projekt auch um die Klärung, ob und wie rechtliche Rahmenbedingungen für diese Form der Logistik notwendig sind und wie diese ausgestaltet werden müssen. Um die Fragen gesetzlicher Anpassungen im Straßenverkehrs-, Haftungs- und Datenschutzrecht eruieren zu können werden auch die Erkenntnisse aus den anderen Bereichen herangezogen. Dies soll den Weg ebnen für den späterem Einsatz der Lieferroboter und administrative Genehmigungsverfahren als Grundlage dienen.
Über die Beteiligten
Prof. Frank Schrödel hat die Professor für Antriebs-, Automatisierungs- und Robotertechnik an der Hochschule Schmalkalden inne, die an der Fakultät für Maschinenbau angesiedelt ist. Die Leitthemen seiner Forschung sind das autonome Fahren, die Industrie 4.0 und Social Robots. Die Klärung der rechtlichen Aspekte übernimmt Prof. Ulf Müller aus dem Bereich Wirtschaftsrecht an der HSM. Er ist zudem Teil des Forschungsschwerpunktes „Rechtsordnung der digitalen, nachhaltigen und standardisierten Wirtschaft und Gesellschaft“, was die Nähe zum RoboTrace-Projekt nochmals verdeutlicht.
Prof. Frank Schrödel
An der Technischen Universität Bergakademie Freiberg hat Prof. Sebastian Zug die Professur für Softwaretechnologie und Robotik und ist zugleich an der Arbeitsgruppe Softwareentwicklung und Robotik beteiligt. Seine Forschungsschwerpunkte im Horizont mobiler Systeme liegen auf der robusten Umgebungserfassung und Erreichbarkeitsanalysen in realen Szenarien.
Prof. Sebastian Zug
Neben wissenschaftlichen Mitarbeitenden und Partnern aus Politik und Wirtschaft lässt sich die Einbindung von Assistant Professor Felix Wilhelm Siebert hervorheben, der an der Technischen Universität Dänemark im Bereich der Verkehrspsychologie forscht. Neben der Experimentalpsychologie widmet er sich Mensch-Maschinen-Verhältnissen und Fragen der Fahrzeug- sowie Verkehrssicherheit.
Assistant Professor Felix Wilhelm Siebert
Zum Abschluss kann noch auf ein Video der Allianz ThürIng verwiesen werden, das aus Anlass des Workshops entstanden ist:
Wir bedanken uns für die finanzielle Unterstützung des Projektes durch das Bundesministerium für Digitales und Verkehr unter dem Förderkennzeichen 19F1117A (Förderprogramm mFUND).